
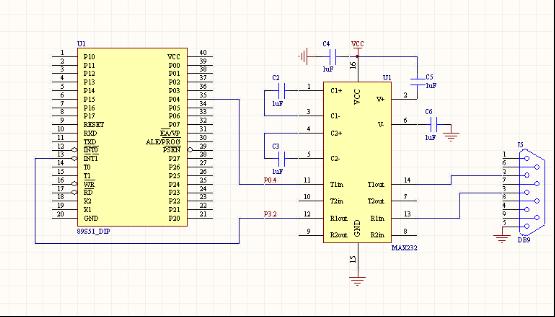
論壇新老朋友們。祝大家新年快樂。在新的一年開始的時(shí)候,給大家一點(diǎn)小小的玩意。工程師經(jīng)常碰到需要多個(gè)串口通信的時(shí)候,而低端單片機(jī)大多只有一個(gè)串行口,甚至沒有串口。這時(shí)候無論是選擇高端芯片,還是更改系統(tǒng)設(shè)計(jì)都是比較麻煩的事。我把以前搞的用普通I/O口模擬串行口通訊的程序拿出來,供大家參考,希望各位兄弟輕點(diǎn)拍磚。基本原理:我們模擬的是串行口方式1.就是最普通的方式。一個(gè)起始位、8個(gè)數(shù)據(jù)位、一個(gè)停止位。模擬串行口最關(guān)鍵的就是要計(jì)算出每個(gè)位的時(shí)間。以波特率9600為例,每秒發(fā)9600個(gè)位,每個(gè)位就是1/9600秒,約104個(gè)微秒。我們需要做一個(gè)精確的延時(shí),延時(shí)時(shí)間+對(duì)IO口置位的時(shí)間=104微秒。起始位是低狀態(tài),再延時(shí)一個(gè)位的時(shí)間。停止位是高狀態(tài),也是一個(gè)位的時(shí)間。數(shù)據(jù)位是8個(gè)位,發(fā)送時(shí)低位先發(fā)出去,接收時(shí)先接低位。了解這些以后,做個(gè)IO模擬串口的程序,就是很容易的事。我們開始。先上簡單原理圖:就一個(gè)MAX232芯片,沒什么好說的,一看就明白。使用單片機(jī)普通I/O口,232數(shù)據(jù)輸入端使用51單片機(jī)P3.2口(外部中斷1口,接到普通口上也可以,模擬中斷方式的串行口會(huì)有用。呵呵)。數(shù)據(jù)輸出為P0.4(隨便哪個(gè)口都行)。
下面這個(gè)程序,您只需吧P0.4 和P3.2 當(dāng)成串口直接使用即可,經(jīng)過測(cè)試完全沒有問題.
2、底層函數(shù)代碼如下:
sbit TXD1 = P0^4; //定義模擬輸出腳
sbit RXD1 = P3^2; //定義模擬輸入腳
bdata unsigned char SBUF1; //定義一個(gè)位操作變量
sbit SBUF1_bit0 = SBUF1^0;
sbit SBUF1_bit1 = SBUF1^1;
sbit SBUF1_bit2 = SBUF1^2;
sbit SBUF1_bit3 = SBUF1^3;
sbit SBUF1_bit4 = SBUF1^4;
sbit SBUF1_bit5 = SBUF1^5;
sbit SBUF1_bit6 = SBUF1^6;
sbit SBUF1_bit7 = SBUF1^7;
void delay_bps() {unsigned char i; for (i = 0; i < 29; i++); _nop_();_nop_();} //波特率9600 模擬一個(gè)9600波特率
unsigned char getchar2() //模擬接收一個(gè)字節(jié)數(shù)據(jù)
{
while (RXD1);
_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();
delay_bps();
SBUF1_bit0 = RXD1; //0
delay_bps();
SBUF1_bit1 = RXD1; //1
delay_bps();
SBUF1_bit2 = RXD1; //2
delay_bps();
SBUF1_bit3 = RXD1; //3
delay_bps();
SBUF1_bit4 = RXD1; //4
delay_bps();
SBUF1_bit5 = RXD1; //5
delay_bps();
SBUF1_bit6 = RXD1; //6
delay_bps();
SBUF1_bit7 = RXD1; //7
delay_bps();
return(SBUF1) ; //返回讀取的數(shù)據(jù)
}
void putchar2(unsigned char input) //模擬發(fā)送一個(gè)字節(jié)數(shù)據(jù)
{
SBUF1 = input;
TXD1 = 0; //起始位
delay_bps();
TXD1 = SBUF1_bit0; //0
delay_bps();
TXD1 = SBUF1_bit1; //1
delay_bps();
TXD1 = SBUF1_bit2; //2
delay_bps();
TXD1 = SBUF1_bit3; //3
delay_bps();
TXD1 = SBUF1_bit4; //4
delay_bps();
TXD1 = SBUF1_bit5; //5
delay_bps();
TXD1 = SBUF1_bit6; //6
delay_bps();
TXD1 = SBUF1_bit7; //7
delay_bps();
TXD1 = 1; //停止位
delay_bps();
}
3、實(shí)現(xiàn)串行通訊。在主程序文件中直接調(diào)用上面的getchar2()和putchar2()函數(shù),配合電腦的串行口,即可實(shí)現(xiàn)串行通訊功能
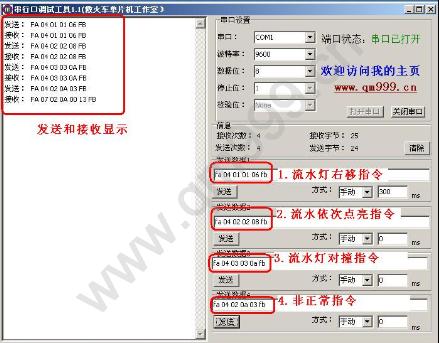
4、請(qǐng)參考完整程序文件,不過此串行通訊為程序查詢方式,如果程序中有中斷程序,很可能會(huì)造成接收數(shù)據(jù)丟失。在一會(huì)繼續(xù)發(fā)一個(gè)帖子,把利用中斷方式串行通訊程序也發(fā)來給大家看看。注意問題:1、波特率是可以有誤差,但每個(gè)位的誤差,不能大于3%2、中斷可能會(huì)改變延時(shí)的時(shí)間。如果你的中斷里的程序較長,應(yīng)該在模擬串口接收和發(fā)送時(shí)禁止中斷。3、接收時(shí)要延時(shí)1.5個(gè)的位時(shí)間(一個(gè)起始位+半個(gè)數(shù)據(jù)位)。使數(shù)據(jù)位的采樣點(diǎn)盡量放在數(shù)據(jù)位的中間。
完整程序工程源代碼:點(diǎn)擊下載
主程序:
#include <reg51.h>
#include "delay.h"
#include "sub4094.c"
#include <intrins.h>
sbit spk = P2^5; //定義蜂鳴器使用的I/O口P2.5
sbit LED = P2^7;
#include "subuart2.c"
void main (void)
{
unsigned char first,zjgs,order,zhen_xh,jym,end; //定義起始字、字節(jié)個(gè)數(shù)、命令碼、幀序號(hào)、校驗(yàn)碼、結(jié)束字
unsigned char i; //定義1個(gè)隨機(jī)變量
unsigned char sum; //定義單片機(jī)計(jì)算用的校驗(yàn)碼
unsigned char LED_contrl; //指示燈控制字
unsigned contrl_1,contrl_2; //移位變量
//unsigned int delay_counter;
P5=0xEF; //使能流水燈,屏蔽數(shù)碼管
P4=0x00; //流水燈全部點(diǎn)亮
update4094(); //刷新流水燈狀態(tài)
delay_ms(300);
P4=0xFF; //流水燈全部熄滅
update4094(); //刷新流水燈狀態(tài)
while(1)
{
first=getchar2(); //讀取6個(gè)數(shù)據(jù)進(jìn)行處理。
zjgs=getchar2();
order=getchar2();
zhen_xh=getchar2();
jym=getchar2();
end=getchar2();
if(0xfa != first) goto end;
sum=zjgs+order+zhen_xh;
if(sum != jym)
{
putchar2(0xfa); //起始字
putchar2(0x07); //字節(jié)個(gè)數(shù)
sum=0x07;
putchar2(order); //接收到的命令碼
sum+=order;
putchar2(zhen_xh); //接收到的幀序號(hào)
putchar2(0x00); //命令校驗(yàn)錯(cuò)誤標(biāo)志位
sum+=zhen_xh;
putchar2(sum); //校驗(yàn)碼
putchar2(0xfb);
//蜂鳴器發(fā)出報(bào)警聲音,指示燈閃爍
for(i=0;i<8;i++)
{
LED=~LED; //取反指示燈
spk=~spk; //取反蜂鳴器
delay_ms(200);
}
goto end;
}
if(0xfb != end) goto end;
switch(order)
{
case 1: //將收到的命令返回給串行口
LED=0;
putchar2(first); //起始字
putchar2(zjgs); //字節(jié)個(gè)數(shù)
putchar2(order); //命令碼
putchar2(zhen_xh); //幀序號(hào)
putchar2(jym); //校驗(yàn)碼
putchar2(end); //結(jié)束字
delay_ms(50);
LED=1;
//流水燈效果 循環(huán)右移
P4=0xff; //熄滅所有指示燈
update4094();
LED_contrl=0x01; //初始化指示燈控制字節(jié)
delay_ms(50); //延時(shí)300MS
for(i=0;i<8;i++)
{
P4=~LED_contrl; //點(diǎn)亮控制字節(jié)相應(yīng)指示燈
update4094();
delay_ms(50);
LED_contrl<<=1;
}
P4=0xff; //熄滅所有指示燈
update4094();
break;
case 2: //將收到的命令返回給串行口
putchar2(first); //起始字
putchar2(zjgs); //字節(jié)個(gè)數(shù)
putchar2(order); //命令碼
putchar2(zhen_xh); //幀序號(hào)
putchar2(jym); //校驗(yàn)碼
putchar2(end); //結(jié)束字
//流水燈效果 從左到右逐個(gè)點(diǎn)亮
P4=0xff; //熄滅所有指示燈
update4094();
LED_contrl=0xff; //初始化指示燈控制字節(jié)
delay_ms(50);
for(i=0;i<8;i++)
{
LED_contrl<<=1;
P4=LED_contrl;
update4094();
delay_ms(50);
}
break;
case 3: //將收到的命令返回給串行口
putchar2(first); //起始字
putchar2(zjgs); //字節(jié)個(gè)數(shù)
putchar2(order); //命令碼
putchar2(zhen_xh); //幀序號(hào)
putchar2(jym); //校驗(yàn)碼
putchar2(end); //結(jié)束字
//流水燈效果 循環(huán)對(duì)撞
P4=0xff; //熄滅所有指示燈
update4094();
contrl_1=0x02; //初始化移位變量1
contrl_2=0x80; //初始化移位變量2
delay_ms(50);
for(i=0;i<8;i++)
{
LED_contrl=contrl_1|contrl_2;
P4=~LED_contrl; //點(diǎn)亮控制字節(jié)相應(yīng)指示燈
update4094();
delay_ms(50);
contrl_1<<=1; //移位變量1左移1位
contrl_2>>=1; //移位變量2右移1位
}
P4=0xff; //熄滅所有指示燈
update4094();
break;
default:break;
}
end:;
}
}