�@���ǃ���ǰ�Լ������ģ�
�x��STM32F407��Ƭ�C��Сϵ�y(t��ng)�����ģ�K����ij����Ū�����_Դ�w�ذ壬
���w����ģ�K��Ϣ���Ӿ��ڸ���word�ęn�С�
������a�|(zh��)�����ã�����Ҷ��ָ�c��
���@����x���cԭ�ӣ���C����ʹ�����cԭ�ӵij���ģ�K���
���������Č���D���£�

IMG_0466.JPG (1.57 MB, ���d��(sh��): 123)
���d����
2021-3-5 10:05 �ς�
���S�w���������W��ģ
2.1 ���S�w�������w��ԭ�����S�w�����ĽY(ji��)��(g��u)���Ƀɂ�֧�ܽ����γəC�ܣ�Ȼ���ڃɂ�֧�ܵăɶ������������D2-1������(j��)ţ�D�����������������c�����������P(gu��n)ϵ���������a(ch��n)�����µ����������w����������õ�һ�����ϵ��������Ķ�ȥ�˷��������á����Ă��������a(ch��n)�����������������r���w��������Ó�x���棬����(j��)ţ�D�ڶ����������w���ٶȸ��|(zh��)���c�������P(gu��n)ϵ�����S�w���������õ�һ�����ϵļ��ٶ�ʹ���w�����ڴ�ֱ�������\�ӵ�Խ��Խ�죬���Ǯ��w����Ó�x����������c������ȕr���w������������֮ǰ�������ٶ�����������������������w����ͨ�^��׃�Ă�늙C���D(zhu��n)�ف팍�F(xi��n)�w�������ˑB(t��i)��λ�ÿ��ƣ�Ȼ���w�������ڙCе�Y(ji��)��(g��u)�IJ�ͭh(hu��n)��Ӱ푣���ֻͨ�^늙C�õ��������_����(w��n)���w�����h�h����ģ�������Ҫ������Ӌ��C�팍�r���Ƹ���늙C���D(zhu��n)�١� 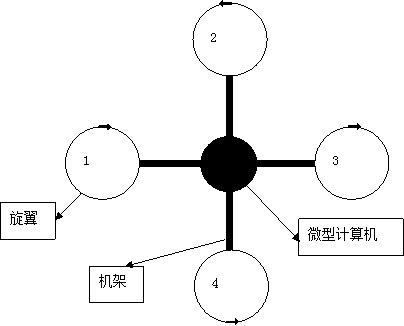
�D2-1 �������w����ģ�� 2.2 ���S�w�����Ĕ�(sh��)�Wģ���ڲ�Ӌ�w�����ď�����׃�����ӵ���r�£��������w��������һ�����������ɶȄ��w����ݔ���Ă�늙C���D(zhu��n)�١����w���������ڵ�������ϵ�������W���Ƿքe��L�ӽ� �������� �������� ��ƫ���� ��ƫ���� ����˵�������ϵ�c���w����ϵ�����D(zhu��n)���R���ƌ�Ҋ4.3�¹�(ji��)����ƽ�ƾ�ꇞ�T���ƌ�Ҋ4.3�¹�(ji��)�� ����˵�������ϵ�c���w����ϵ�����D(zhu��n)���R���ƌ�Ҋ4.3�¹�(ji��)����ƽ�ƾ�ꇞ�T���ƌ�Ҋ4.3�¹�(ji��)��  ��2.1�� ��2.1��
 ��2.2�� ��2.2��
���O(sh��)�w���������S���ܵĔ_�� �������w�����顰X���ͣ�����(j��)ţ�D�ڶ������й�ʽ��2.3�� �������w�����顰X���ͣ�����(j��)ţ�D�ڶ������й�ʽ��2.3�� 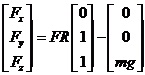 ��2.3�� ��2.3��
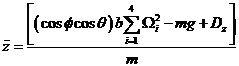
ʽ�� ��ʾ�w�����ڵ�������ϵ�����S�ϵĺ�����F��ʾ�w�����Ă����������w������С��R��ʾ���w��������ϵ�����w����ϵ��ӳ�䵽��������ϵ�����D(zhu��n)��ꇣ� ��ʾ�w�����ڵ�������ϵ�����S�ϵĺ�����F��ʾ�w�����Ă����������w������С��R��ʾ���w��������ϵ�����w����ϵ��ӳ�䵽��������ϵ�����D(zhu��n)��ꇣ� ��ʾF���w��������ϵ�ķ����ٸ���(j��)�DŽ��������õ���K��ϵ�y(t��ng)�����Wģ�͞飺 ��ʾF���w��������ϵ�ķ����ٸ���(j��)�DŽ��������õ���K��ϵ�y(t��ng)�����Wģ�͞飺 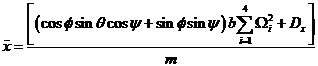 ��2.4�� ��2.4��
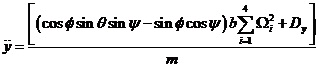 ��2.5�� ��2.5��
 ��2.6�� ��2.6��
 ��2.7�� ��2.7��
 ��2.8�� ��2.8��
 ��2.9�� ��2.9��
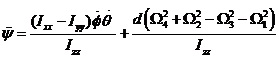
���У� ���Ă��������D(zhu��n)�٣�b���������أ�m���w�����|(zh��)����g���������ٶȣ�l��늙C���������w���������ĵľ��x�� ���Ă��������D(zhu��n)�٣�b���������أ�m���w�����|(zh��)����g���������ٶȣ�l��늙C���������w���������ĵľ��x�� ���������@�S���D(zhu��n)�ӑT���� ���������@�S���D(zhu��n)�ӑT���� ��������ϵ��D(zhu��n)�ӑT���� ��������ϵ��D(zhu��n)�ӑT���� �阪�~���w���ٶȣ�d���L��ϵ��(sh��)�� �阪�~���w���ٶȣ�d���L��ϵ��(sh��)�� ���ڌ��H�������nj���ϵ�y(t��ng)��B(t��i)���� ����ʽ�����Р�B(t��i)�T�� ����ʽ�����Р�B(t��i)�T�� �c������ݔ�� �c������ݔ�� �ɱ�ʾ�� �ɱ�ʾ��  ��2.10�� ��2.10��
 ��2.11�� ��2.11�� 2.3 ���S�w�������ˑB(t��i)��������������һ����ݔ����ݔ����Ƿ�(q��)��ϵ�y(t��ng)��ֻ��Ҫ�����Ă�늙C���D(zhu��n)�٣��������Ч�Ŀ����w�������ˑB(t��i)�����eע����Ǟ��˵���늙C���D(zhu��n)�a(ch��n)�������أ���ѭ����늙C�����D(zhu��n)�����෴������늙C���D(zhu��n)������ͬ��ԭ�t�� 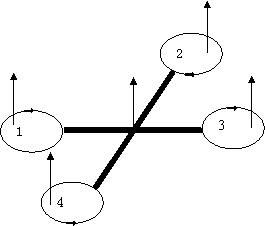 
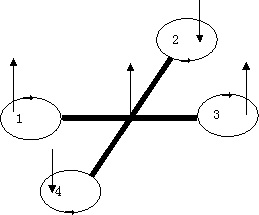  �D2-2��ֱ�\��ģ�͈D �D2-3ǰ���\��ģ�͈D �D2-2��ֱ�\��ģ�͈D �D2-3ǰ���\��ģ�͈D
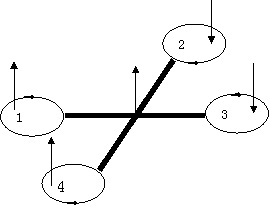
�D2-4�����\��ģ�͈D �D2-5ƫ���\��ģ�͈D ���ψD�늙C1��3��형r����D(zhu��n)��늙C2��4����r����D(zhu��n)������������w����ǰ���� 2.3.1 ��ֱ�\�� �ڈD2-2�У�ͬ�r�����Ă�늙C���D(zhu��n)�٣�ʹ���w�����Ŀ��w���������������������w���������r������ʹ��������ֱ�������෴�����Ă�늙C���ٶ�ͬ�r�pС���������w�������܉�ֱ�����\�ӣ����ֻ�Ю��w�������������õ��������r�ŝM���ͣ�l���� 2.3.2 ǰ���\�� �ڈD2-3�У�늙C1��2���D(zhu��n)���½���늙C3��4���D(zhu��n)�����ӣ�ʹ���w�����a(ch��n)����ǰ�ăAб�������ˑB(t��i)�M������������D2-6��F(xi��n)�������혪�~�a(ch��n)���ĺ��������������ĸ����ǣ����Կ՚���������F����ˮƽ������Qֱ�����M�зֽ���Qֱ���������F*cos������ⴹֱ�\��F*cos=mg����ˮƽ����ķ�����F*sin����˕��w��������ˮƽ�����\�ӡ� 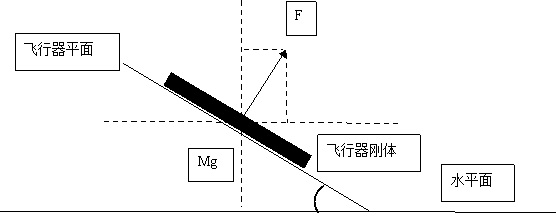
�D2-6 ���������D 2.3.3 �����\���ڈD2-4�У�늙C2��3���D(zhu��n)���½���늙C1��4���D(zhu��n)�����ӣ�ʹ���w�����ęM�L�ǰl(f��)����׃���c�D2-6��ƣ��w�����������ڂ�(c��)����a(ch��n)��һ��ˮƽ����������w�������l(f��)�������\�ӡ� 2.3.4 ƫ���\���ڈD2-5�У�늙C1��3�D(zhu��n)�����ӣ�늙C2��4�D(zhu��n)�ٜpС��ʹ�Ãɂ��������ز�ƽ�⣬�w�����������Ķ������������w�������^����λ�l(f��)����׃������ʹ�w���������c����ƽ�⣬늙C1��3�D(zhu��n)�����ӵ�ͬ�r��p������ɂ�늙C���D(zhu��n)�١� 2.4 ���S�w������λ�ÿ��ƽ����ڈD2-3��2-4�б���������ͨ�^�ˑB(t��i)���Ɓ������w������ˮƽλ��׃����Ȼ��λ��׃����ȡ�Q���������w�����ĸ����ǣ��M�L�ǵĴ�С�ͳ��m(x��)�r�g����ǰ�M�\�Ӱl(f��)��λ�ø�׃?y��u)����M���f�����ڰl(f��)��ǰ�M�\�����w�����ĸ߶ȱ��ֲ�׃����ʼ��B(t��i)���ͣ��ˮƽ�����ٶȞ�0�����ڈD2-6���M���������������Եĵ��w�����ļ��ٶ�ֵ ��ֵ����ͨ�^���݃x�y�ã��ٸ���(j��)�ѽ�(j��ng)�O(sh��)����λ��ֵs��ˮƽ�w�Еr�g ��ֵ����ͨ�^���݃x�y�ã��ٸ���(j��)�ѽ�(j��ng)�O(sh��)����λ��ֵs��ˮƽ�w�Еr�g ���ڼ����w���^�������w�����T�Դ��ڜp���^�̮a(ch��n)����λ�������ڴ˺��Բ�Ӌ���w�����^�����ܵ��՚�����Ҳ���Բ�Ӌ����˿���ͨ�^�O(sh��)����λ������ʹ�w�������_Ŀ���c�� ���ڼ����w���^�������w�����T�Դ��ڜp���^�̮a(ch��n)����λ�������ڴ˺��Բ�Ӌ���w�����^�����ܵ��՚�����Ҳ���Բ�Ӌ����˿���ͨ�^�O(sh��)����λ������ʹ�w�������_Ŀ���c�� 2.5 ����С�Y(ji��)���¹�(ji��)������������w�����Ą����W��ģ���քe���w�����������\�ӡ������\�ӡ�ǰ���\�ӡ�ƫ���\���ˑB(t��i)�M��ģ�ͷ������õ�ᘌ���ͬ�ˑB(t��i)����늙C���D(zhu��n)��׃��څ�ݣ�����λ�ÿ����M��������������Փ�U����
��3�� ���S�w����Ӳ���O(sh��)Ӌ
3.1 ���w����Փ�C����һ�������w�������䃞(y��u)�c�������p������٣�һ���֙C늳ض��܉��(q��)�ӣ������{(di��o)ԇ��Σ�U�Եͣ��������w�ذ����ܴ�̶ȵĜp�����_�l(f��)���ڣ�������������ȱ�c�����������p���ɔ_���������d�������ͣ�һ��ֻ���چμ����w�У���;�^�١� ����������С���w�������䃞(y��u)�c���ڷ��ɔ_������������һ�����d�������������;���^�V����������������늸ߡ�늙C�D(zhu��n)�ٿ졢�����{(di��o)ԇ��Σ�U�Ըߵ�ȱ�c�� �����_�����w����֮�����܉�Ѹ�ٰl(f��)չ�����������;�V�����漰���I(l��ng)��࣬�μ����w�в��]�ж��ʹ�Ãrֵ����˛Q�����÷������M���O(sh��)Ӌ�� 3.2 ���w�����O(sh��)Ӌ 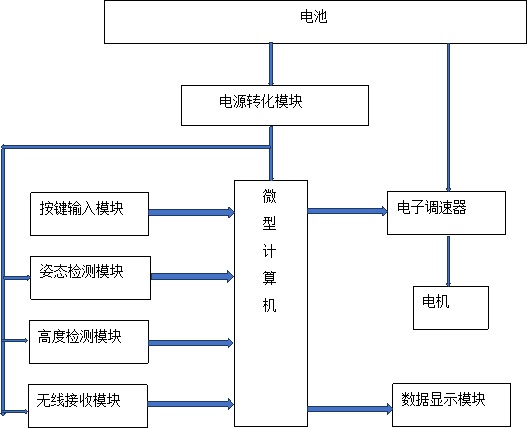
�D3-1 ���w�Y(ji��)��(g��u)�D 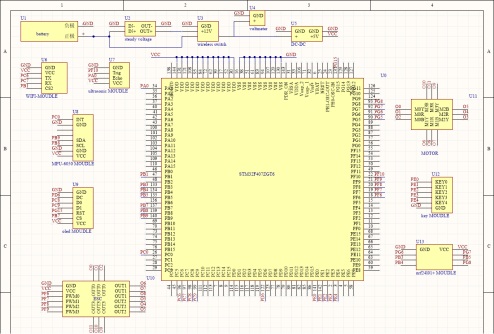
�D3-2 ���w�·�D 늳أ��������w�����ṩ��ܡ� �Դ�D(zhu��n)��ģ�K����(n��i)���o���^����_�P(gu��n)�����������w�����Ƿ�늣�ͬ�r��DC-DCģ�K���������������Ԫģ�K��늡� ���Iݔ��ģ�K�������ھ��{(di��o)ԇ���Լ��O(sh��)��λ�����ˡ� �ˑB(t��i)�z�yģ�K���������S�����������r�z�y�w�����ļ��ٶȔ�(sh��)��(j��)�����݃x��(sh��)��(j��)��ͨ�^�V���㷨�õ���(w��n)���ʴ_���ˑB(t��i)�ǡ� �߶șz�yģ�K���@���w�����ľ��x����߶Ȕ�(sh��)��(j��)�� �o������ģ�K������b����ʹ�ý����b������ݔ�^�������T���������M�L��ƫ���Ȕ�(sh��)��(j��)�� ��(sh��)��(j��)�@ʾģ�K������I�P�O(sh��)��Ŀ�����ˣ�ͬ�r�܉����{(di��o)ԇ�r�@ʾ��Ҫ��(sh��)��(j��)ֵ�� ����{(di��o)������������ݔ����PWM���}�_�����{(di��o)�ƣ������D(zhu��n)����늙C���H��ݔ��늉����ஔ��늙C�(q��)������ 3.3 ģ�K�·
3.3.1 �Դ����1.늳� �mȻ늳���������늳������^�ء��늳���ͬ��늳����������p�ġ����wЧ����ߵģ��C�Ͽ��]�����w�w�������������m(x��)���������늳���̖��2200mah��35C��3S��D3-3�� 2200mah��ʾ늳����������ԓ����늳���2200ma��늣����Գ��m(x��)���1С�r������1000ma��늿ɳ��m(x��)���2.2С�r�� 3S��ʾ늳ع�(ji��)��(sh��)���늳�һ��(ji��)�˜�늉�3.7V��3S����11.1V�� 35C����늳صķ���������@����ͨ�늳غ̈́����늳ص���Ҫ�^(q��)�e�������늳���Ҫ�ܴ�������늣��@������������� C����ʾ�����늳���1000mah��10C����ô�ó�늳صķ��������Ԟ�1000*10mh������C늳ش������늕��p��늳�������ȼ�� 
�D3-3 늳،��� 2.�����· 
�D3-4 �����·�D �����·�Ƀɲ��ֽM�ɣ���һ���֞�o���^����_�P(gu��n)�����������w�����Ĺ�늡��ڶ����֞齵������늳�늉������m�ϸ���ģ�K����������늉�ֵ��5V���� ��1�����˿����������w�������w���^���еİ�ȫ����ֹ�����¹ʰl(f��)��������ֱ����·�b���_�P(gu��n)�^�����D3-5��  
�D3-5 12Vֱ����·�b���_�P(gu��n)�^������� ��2������늳�ݔ����늉���11-12.6V֮�g���o��ֱ�ӽo����оƬ����ģ�K�·��늣��������DC-DC����ģ�K��늳�늉�����5V������ģ�K��D3-6��ԓģ�Kݔ��늉�3-40V���{(di��o)��(ji��)�λ����׃ݔ��늉���ݔ�����ʸ��_10W�� 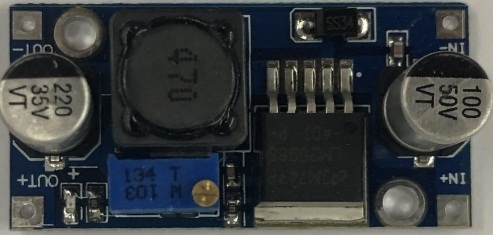
�D3-6 LM2596ֱ������ģ�K���� 3.3.2 ���Iݔ�뼰�@ʾģ�K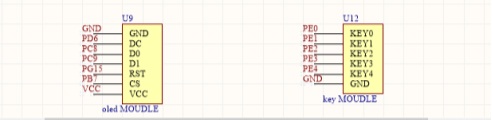
�D3-7 ���I�@ʾ�·�D 1. ����������ϵ�y(t��ng)�O(sh��)Ӌ�У���Ҫ�{(di��o)ԇPID����(sh��)���O(sh��)��λ����Ϣ����˼������傀���I�M�и���ֵ�������{(di��o)ԇ����D3-8���ҷ����I�����Ӕ�(sh��)ֵ�������I�r�pС��(sh��)ֵ���Ϸ����·����I�Á��ГQ���ĵ�׃�������g�Ǵ_�J�I�� 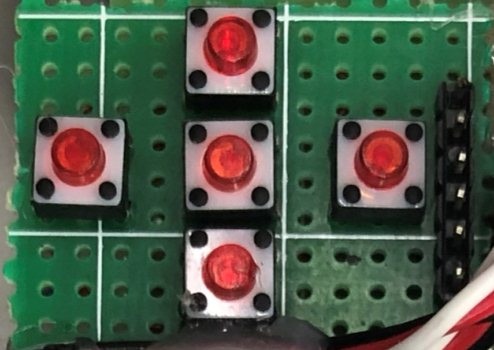
�D3-8 ���Iģ�K���� 2. �@ʾ���ֲ���oled12864�@ʾ���䃞(y��u)�c�����p���w�eС���ֱ��ʸߣ��^TFT��Ļ���^���r��ͨ�ŷ�ʽ��SPI���@ʾ����D3-9�� 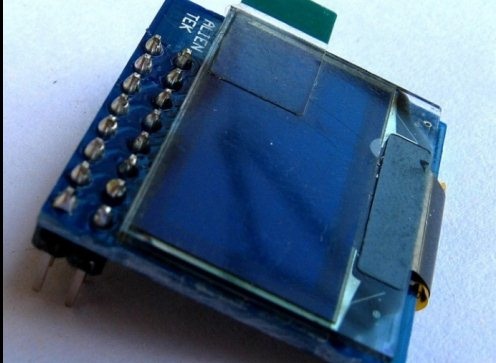
�D3-9 oled�@ʾ������ 3.3.3 ��Ӌ��C�x�õ�MCU��ST��˾��stm32f407zgt6��D3-10�� 
�D3-10 stm32f407zgt6��Сϵ�y(t��ng) 3.3.4 �ˑB(t��i)�z�yģ�K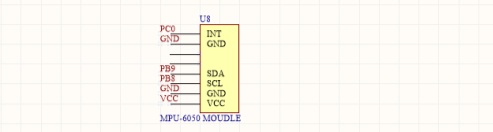
�D3-11 �ˑB(t��i)�z�y�·�D �ˑB(t��i)�z�y���ó��õ�mpu-6050�������������������݃x�����ٶȂ�����̎���M����������������M�������������M�����݃x���c���ٶȕr֮�S�g��Ć��}���sС���b���g����߀���еڶ���IIC�˿��B���������ٶȡ�������������������(sh��)λ�\��̎��Ӳ���������棬����ҪIIC�˿��Ԇ�һ��(sh��)��(j��)������ʽ��������ݔ�������ľ��S�ں����㔵(sh��)��(j��)����ݔ���Д֧࣬���ˑB(t��i)�R�e���u�z������Ŵ�sС���L�ӡ������½��Дࡢhigh-G�Дࡢ������Б�(y��ng)���|���Б�(y��ng)�ȹ��ܡ��Ԏ�1024�ֹ�(ji��)FIFO�������ڽ���ϵ�y(t��ng)���ġ�InvenSence���\��̎���Y�ώ죬��̎���\�ӸМy�ď�(f��)�s��(sh��)��(j��)���������\��̎���\�㌦����ϵ�y(t��ng)��ؓ�ɣ����鑪(y��ng)���_�l(f��)�ṩ�ܘ�(g��u)��API��Mpu-6050�Ľ��ٶ�ȫ��Мy������ �� �� �� �� �� �� /sec(dps)���ɜʴ_ۙ���ٺ����ل��������ҿ����ó�����Ƽ��ٶ�ȫ��Мy������ /sec(dps)���ɜʴ_ۙ���ٺ����ل��������ҿ����ó�����Ƽ��ٶ�ȫ��Мy������ �� �� �� �� �� �� �����������ڲ�ͬ늉��¹�����ģ�K������D3-12�� �����������ڲ�ͬ늉��¹�����ģ�K������D3-12�� 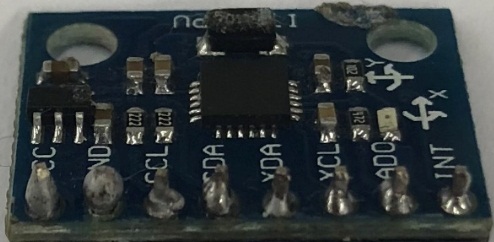
�D3-12 MPU-6050���� 3.3.5 �߶șz�yģ�K
�D3-13 �߶șz�y�·�D �߶șz�y������Ҫ���������N��ͨ�^�≺Ӌ�z�y�����ęz�y�߶ȷ������Ǿ��Ȳ��ߣ������������a(ch��n)���Ě���Ӱ푚≺Ӌ��ͨ�^�t�⾀�z�y�����ȸߣ��z�y�ĸ߶����ޣ��r���F�����ҕ������w��ɂ�����������ͨ�^�����z�y���䷽�����ȸߣ��z�y���x���ޣ����������ɔ_�������w�o�����C�ϸ������ز��ó����y�࣬����ģ�K��D3-14�� 
�D3-14 ����ģ�K���� VCC�Դ��Trig ݔ�������̖�ˣ�Echo ���նˣ�Gnd ���ء� ����IO�|�l(f��)�y�ࡢ�otrig����10us�ĸ��ƽ��̖��Ȼ��ģ�K���ԄӰl(f��)��8��40KHZ�ķ������Ԅәz�y�Ƿ�����̖���أ�����̖���ء���ͨ�^echo�˿�ݔ��һ�Εr�g�ĸ��ƽ��̖�����ƽ�ij��m(x��)�r�g���dz����İl(f��)�䵽���صĕr�g����˾��x=�����ƽ�r�g*��*0.5���� 3.3.6 �o����ݔģ�K�o����ݔ������Ҫ�У�ͨ�^���ՙC��(sh��)������ݔ���x���^�h������Ҫ����ݔ�����b�������I���׳�Ʒ�r����^���F��ͨ�^2.4G��nrf24l01+ģ�K�M�д��ݔϵ�y(t��ng)����r�ͣ����ǂ�ݔ���x�̣�ͨ�^WiFi��ݔ��̖�������֙C��(y��ng)�������b������ֻ��Ҫ��ُ�IWiFi����ģ�K����ݔ���x�����̖�|(zh��)���ã����ױ��ɔ_���C�ϸ��������x��WiFi�o����ݔ������ 1. ����ATK-WIFI-MODULE��ALIENTEK�Ƴ���һ����f����wifi���Ĕz���^ģ�K����ģ�K֧����ƽ��/�֙C�� 1280*720 �ֱ����������գ��Լ��D�r����ģ�Kʹ��Ҳ�^�麆�Σ�ֻ��Ҫ�����ض�����һ�����ڣ���(sh��)��(j��)��ʽ��������19200��һ����ʼλ��һ���Kֹλ���g��40MS�l(f��)��һ�Σ�һ�ΰl(f��)��8���ֹ�(ji��)�����܌��F(xi��n)�֙C�cԓģ�K�Ĕ�(sh��)��(j��)��ݔ��ԓģ�K��D3-15��ԓģ�K�·�D��D3-16 
�D3-15 ATK-WIFI-MOUDLE ���� 
�D3-16 WiFi��ݔ�·�D 2.����nrf24l01+ģ�K�M�д�b������nrf24l01+��һ�����2.4-2.5Gͨ��ISM�l�εĆ�Ƭ�ַ�оƬ����ģ�K�������l�ʰl(f��)������ģʽ�����������ʷŴ��������w�Ŵ������{(di��o)���������{(di��o)����ݔ�������l���xȡ���f(xi��)�h���O(sh��)�ÿ���ͨ�^SPI�ӿ��M���O(sh��)�õ͵�������ģ��������ڰl(f��)��ģʽ�°l(f��)�书�ʞ�6dBm�r�����9mA������ģʽ��12.3mA�����ģʽ�ʹ��Cģʽ��������ĸ��͡�֧����ͨ���Ĕ�(sh��)��(j��)���ա� 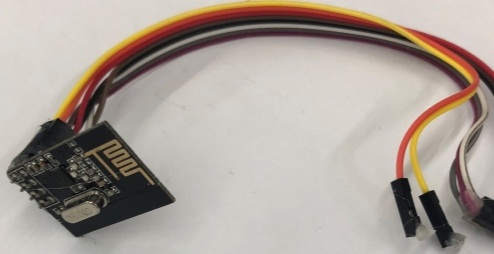
�D3-17 nrf24l01+ģ�K���� 
�D3-18 nrf24l01+��ݔ�·�D 3.3.7 늙C�����~���C�ܼ�����{(di��o)���������ǙC�ܣ��C����һ���w�����ĺ���Ӳ����Ҫ��Ӳ�ȸߡ��|(zh��)���p���ڄ�����ʎ����r�²��װl(f��)����׃����˲���F330���S�C����D3-19�� 
�D3-19 �C�܌��� ����ǘ��~��Ҫ���S�ķ�(w��n)�����|(zh��)���p���װl(f��)����׃���{�ijߴ����c늙C��kvֵƥ�䣬һ��kvֵ�ğoˢ늙C��ͳߴ�{�~�����ǿ��]���C���Ŀ��w�����x�����ߴ�Ę��~8045����ע����Ǹ�kvֵ���ߴ�늙C������늙C�L�r�g�����ڸ��D(zhu��n)�٣��������늙Cؓ�d�^��p��늙C��늙C��D3-20�����~��D3-21�� 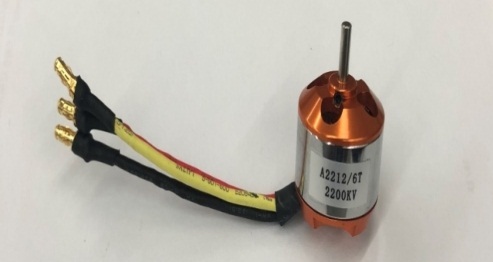
�D3-20 늙C����

�D3-21 ���~���� �������{(di��o)��������oˢ늙C���(q��)������ֻ��Ҫݔ��PWM���ξͿ�ݔ������(y��ng)��늉��(q��)��늙C��PWM���ε��l�ʞ�50HZ��������T��һ����������2MS���ƽ�r�g����С���T�O(sh��)�Þ�һ����������1MS�ĸ��ƽ�r�g������{(di��o)����������D3-22�� 
�D3-22 ����{(di��o)�������� 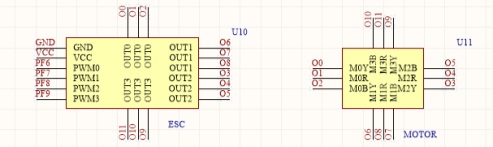
�D3-23 늙C�(q��)���·�D 3.3.8 �b����1.����ʹ��WiFiģ�K��ݔ��(sh��)��(j��)�r����������APPʹ�á��������֙C�����d����(y��ng)APPȻ����_�w�����Դ����WiFiģ�K����s��10s���ң����������֙C�B�����֞顰minifly���ľW(w��ng)�j(lu��)���B�ӳɹ�����_APP���Կ����z���^���棬���_��������r����(sh��)��(j��)�Ͱl(f��)�͵�WiFiģ�K�����O(sh��)���п����ГQ��ͬ�IJ������档���{(di��o)ԇ�^������Ҫ��APP�����w������ 2.������nrf24l01+ģ�K��Ҫ�Լ���b�����������Ҫ�õ���Ƭ�C�����Ɵo����ݔģ�K���l(f��)�͔�(sh��)��(j��)��ͬ�r�����w�����Ĕ�(sh��)��(j��)�Ãɂ��p�S�u�U���u�U̎�ڲ�ͬλ�þ��в�ͬ��늉�ֵ�������Ҫ��늉�ֵ�Æ�Ƭ�C�M��AD�D(zhu��n)���ɔ�(sh��)��������ͨ�^�o����ݔģ�K����(sh��)��(j��)�l(f��)�͂��w�����ϵĽ���ģ�K���p�S�u�U��D3-24���b���������D3-25���b�����·��D3-26�� 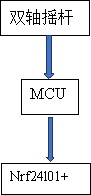 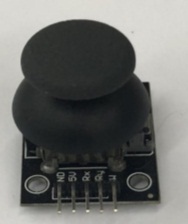 �D3-24 �p�S�u�U���� �D3-25 �b����Ӳ����D 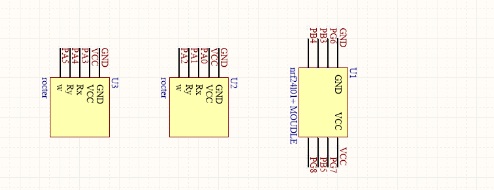
�D3-26 �b�����·�D 3.4 ����С�Y(ji��)���¹�(ji��)�U���˶�N������(y��u)ȱ�c���Ӳ��ϵ�y(t��ng)��D���·ԭ��D���Լ�������Ԫ�·���xȡ������������Ԫ�·��늚����������������w�·�Č��������·�M�Мyԇ������늙z�y���^�칩���r������ģ�K�������������� ��4�� ���S�w����ܛ���O(sh��)Ӌ
4.1�_�l(f��)�h(hu��n)��MDK5����keil��˾�l(f��)�е�һ������C���g����朽�������R����������ď���IC�_�l(f��)�h(hu��n)����֧�ֶ�N�Z�Ծ��̣����g���܉�������Ɉ�(zh��)��Ч���^�ߵąR�����a���_�l(f��)�h(hu��n)��֧���ھ��{(di��o)ԇ�����棬֧�֔��c�{(di��o)ԇ���܉�?q��)��r�^�y�������(zh��)���^����ÿ�����̓�(n��i)�����攵(sh��)��(j��)��׃����r��keil��˾�mȻ�]�аl(f��)�����ĵ��_�l(f��)�h(hu��n)������keilϵ�еĮa(ch��n)Ʒһֱ�������ИI(y��)�����ˆT�ij���ܛ��[7]�� 4.2�{(di��o)ԇܛ����Ҫʹ�õij����{(di��o)ԇܛ���ǡ�ANO_Tech�������S��λ�C_V2.6������ܛ�����ڳ����д��䴮�ڳ�����܉�?q��)��w�п������еĔ�(sh��)��(j��)ͨ�^���ڰl(f��)�͵���X�˵�ܛ���ϣ�����ܛ�����B��ԓ�˿ھ���ʹ�á�ͨ�^�{(di��o)ԇܛ�������^���w�������ˑB(t��i)��(sh��)��(j��)�����r�ʬF(xi��n)�w�����ĚW���ǣ�ͬ�r�Д�(sh��)��(j��)׃�������@ʾ�Ĺ��ܡ�Ҳ�����^���b�����Ă�ݔ��(sh��)��(j��)�Ƿ�������Ҳ�܉�����λ�C���O(sh��)������(y��ng)��PID����(sh��)�����w�����M�Мyԇ�����Կ���늙C�Č��rPWM��(sh��)��(j��)׃����r�� 4.3 ģ�K�����O(sh��)Ӌ��D4-1�������_ʼ�Ȍ����г�����Ҫ�õ����Д���(y��u)�ȼ����������á����r���M�г�ʼ����Ȼ���ڌ��w������ҪӲ���M�Йz�y����Ӳ�������_�Ʉӡ�Ó��Ȇ��}��������(zh��)�У�Ӳ���z��ͨ�^�����늙C�ԙz�O(sh��)��������T����С���T����ͨ�^���I�@ʾ������O(sh��)��Ŀ��λ�õ����ˣ��@ʾ�ij�ʼ���˞鮔ǰ�w���������ˡ���ͨ�^�ˑB(t��i)�z�y����@���w�����ĚW���ǣ��߶șz�y����@���w�������x����ĸ߶ȣ��ٽ����b�����Ŀ�����̖��ͨ�^������̖�IJ�ͬʹ�w���������ڲ�ͬ�����N��B(t��i)���H�ˑB(t��i)���Ơ�B(t��i)�����ߠ�B(t��i)��λ�ÿ��Ơ�B(t��i)������(zh��)����һ���ַ��ص��ˑB(t��i)�z�y������ѭ�h(hu��n)��(zh��)�С�
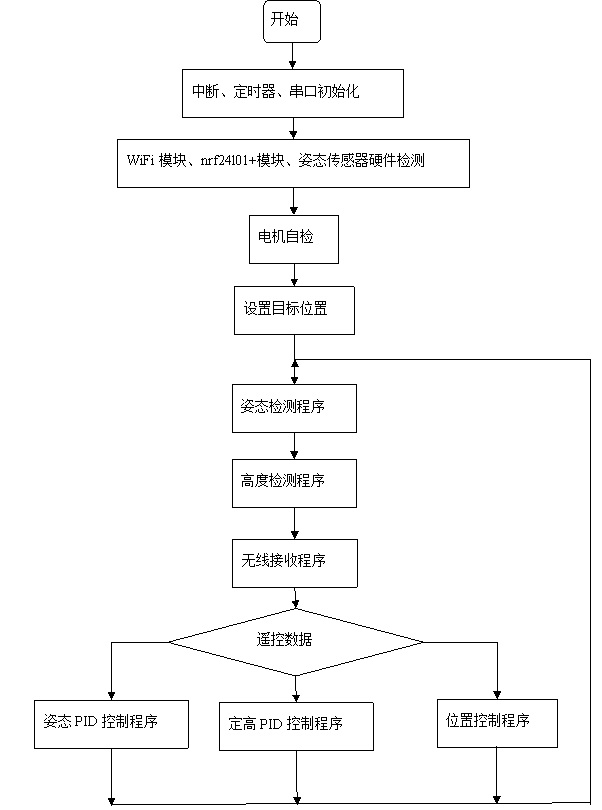
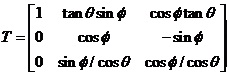
�D4-1 ���w�������̈D 4.3.1 �ˑB(t��i)�z�y�����O(sh��)Ӌ��Ԫ��(sh��)�ˑB(t��i)�����^�̣� �ȏ�һ��ƽ������D(zhu��n)���@Z�S����D4-2����������ϵ���D(zhu��n)�ǶȺ�õ�������ϵ���ڿ��g����һʸ�����քe�ڃɂ�����ϵ�����˷քe�� �� �� ����˃������P(gu��n)ϵ���£� ����˃������P(gu��n)ϵ���£� 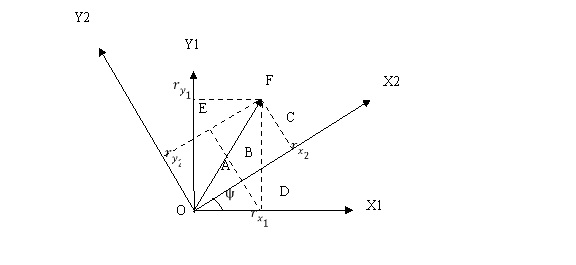
�D4-2 ����ϵ׃�Q�P(gu��n)ϵ�D  ��4.1�� ��4.1��
 ��4.2�� ��4.2��  ��4.3�� ��4.3��
�D(zhu��n)�Q�ɾ�ꇱ��_��ʽ��飺 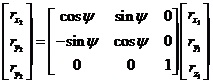 ��4.4�� ��4.4��
ͬ���������@Y�S��X�S���D(zhu��n)�õ��W���Ƿ������Ҿ�ꇣ� 
 ��4.5�� ��4.5��

 ��4.6�� ��4.6��
�����c�ƌ��W���Ƿ������Ҿ����ͬ��˼·���Եõ�����ϵƽ�Ƶ�ƽ�ƾ��T: 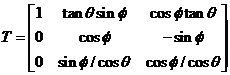 ��4.7�� ��4.7�� ������Ԫ��(sh��)�ɱ�ʾһ�����S����ϵ�����D(zhu��n)���ˌ���(y��ng)�P(gu��n)ϵ�鹫ʽ(4.8)[16]  ��4.8�� ��4.8��
���� , , ��ʾ�ɂ���Ԫ��(sh��)����ַQ��Ԫ��(sh��)�ĸ���˹���e�M������ɡ��Y(ji��)���ɣ�V1= ��ʾ�ɂ���Ԫ��(sh��)����ַQ��Ԫ��(sh��)�ĸ���˹���e�M������ɡ��Y(ji��)���ɣ�V1= ��V= ��V= ; ; �����Ԫ��(sh��) ���棬��Ҫ ���棬��Ҫ =1����||=1�� =1����||=1�� = =  = =  = =  ������(j��)��Ԫ��(sh��)�����|(zh��)�� ������(j��)��Ԫ��(sh��)�����|(zh��)�� 2 2 2 2 2 2 -1; -1; = =  �� �� = - = - �� �� = =  �� �� = -�� = -�� = =  �� �� = -�� = -�� �ʽ��4.8���õ���ʽ��4.9�� 
 ��4.9�� ��4.9��

�D(zhu��n)�Q���ꇱ��_��ʽ��鹫ʽ��4.10��  ��4.10�� ��4.10��
�Ĺ�ʽ��4.10���еõ���Ԫ��(sh��)�������Ҿ�ꇞ鹫ʽ��4.11��  ��4.11�� ��4.11��
����й�ʽ��4.6����ʽ��4.11��RT=R1�õ���Ԫ��(sh��)�D(zhu��n)���ɚW���ǹ�ʽ��4.12�� 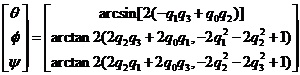 ��4.12�� ��4.12��
�O(sh��)Ӌ˼·������ģ�K�Ԏ��Ĕ�(sh��)���\��̎������DMP: Digital motion processor��Ӳ���������棬ͨ�^IIC�ӿ�ݔ�����S�ˑB(t��i)�ں������㔵(sh��)��(j��)������DMP����ʹ��InvenSence��˾���\��̎���Y�ώ죬�܉�?q��)�ԭʼ�?sh��)��(j��)ֱ���D(zhu��n)������Ԫ��(sh��)[4]���õ���Ԫ��(sh��)�����(j��)��ʽ��4.12��Ӌ����W���ǡ������˳����_�l(f��)�y�ȣ����ϵ�y(t��ng)�Č��r�ԡ��������̈D��D4-3. 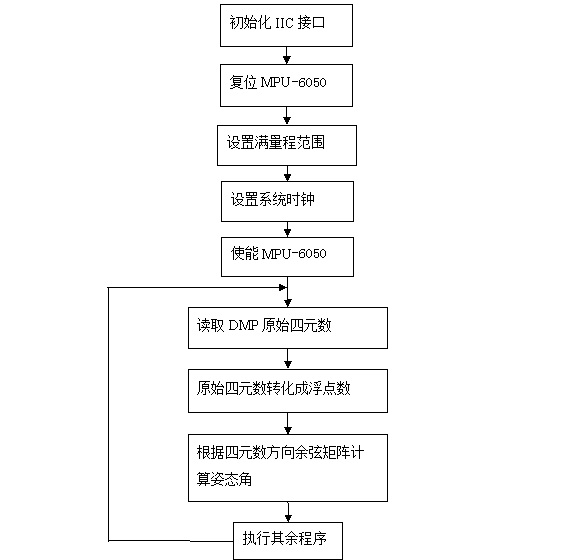
�D4-3 �ˑB(t��i)�z�y���̈D ��ʼ��IIC�ӿڣ���ʹ��MPU-6050�r��Ҫ�т������Ĕ�(sh��)��(j��)���ͽo�������������Ҫ����һ��ͨ�Žӿڣ��@�����õ�IIC�ӿ����ڔ�(sh��)��(j��)ͨ�š� ��(f��)λMPU-6050�����Դ�����Ĵ���1��0x6b�����ơ� �O(sh��)�ÝM���̷����������O(sh��)�ý��ٶȂ������ͼ��ٶȂ����������̷����������݃x���üĴ�����0x1b���ͼ��ٶȂ��������üĴ�����0x1c���O(sh��)�á�ͬ�r�O(sh��)�����݃x�ɘ��ʣ��ɲɘ��ʷ��l�Ĵ�����0x19�����ƣ��O(sh��)�Ô�(sh��)�ֵ�ͨ�V�������ɼĴ�����0x1c�����ơ� �O(sh��)��ϵ�y(t��ng)�r犣����Դ�����Ĵ�����0x6b�����ƣ�һ���x��X�S����PLL����r�Դ���ԫ@�ø��߾��ȵĕr犡� ʹ�܂�������ʹ�ܽ��ٶȂ������ͼ��ٶȂ����������Դ�����Ĵ���2��0x6c�����ơ� �����{(di��o)ԇ����ģ�K������ɺ�������Ҫ�������M�Мyԇ���ڜyԇ�Dz����������S��λ�Cܛ������mpu-6050�ɼ����Ľ��ٶȡ����ٶȺ͚W����ͨ�^���������õĴ��ڰl(f��)�͵�ܛ���������ǰ匍�H�y���������ĽǶȔ�(sh��)��(j��)ȥ���Ȃ������Ĝy����(sh��)��(j��)���^�y�����Ƿ��Ǻϣ�ͬ�r����λ�C���^�씵(sh��)��(j��)�Ƿ���F(xi��n)�^��IJ��ӡ������F(xi��n)�`�����ڳ������M�нǶ��a��������ߜy���Ĝʴ_�ԡ� 4.3.2 �߶șz�y�����O(sh��)Ӌ����������D4-4��ʹ�õij���ģ�K���y�����ƽ�r�g����TIM5���r���IJ��@���ܣ����ù�ʽ ��s:�߶ȣ���λm��t:�r�g����λs���õ����x[2]��������̖��TIM3���r��ÿ200ms�Д�һ�Σ����Д��аl(f��)��15us�ĸ��ƽ�otrig���_���|�l(f��)TIM5���@�Д�Ӌ������ƽ�ij��m(x��)�r�g�� ��s:�߶ȣ���λm��t:�r�g����λs���õ����x[2]��������̖��TIM3���r��ÿ200ms�Д�һ�Σ����Д��аl(f��)��15us�ĸ��ƽ�otrig���_���|�l(f��)TIM5���@�Д�Ӌ������ƽ�ij��m(x��)�r�g�� �y��yԇ����������Ӳ����Y(ji��)�ϣ���oled12864�@ʾ�y���ĸ߶�ֵ�������y��ֵ�ڌ��Hֵ�����ȣ��^�y��(sh��)��(j��)�Ƿ�ʴ_��ͬ�r�^�y��(sh��)��(j��)�Ƿ�l(f��)���^���IJ��ӡ������F(xi��n)���}����ij����M��У���� 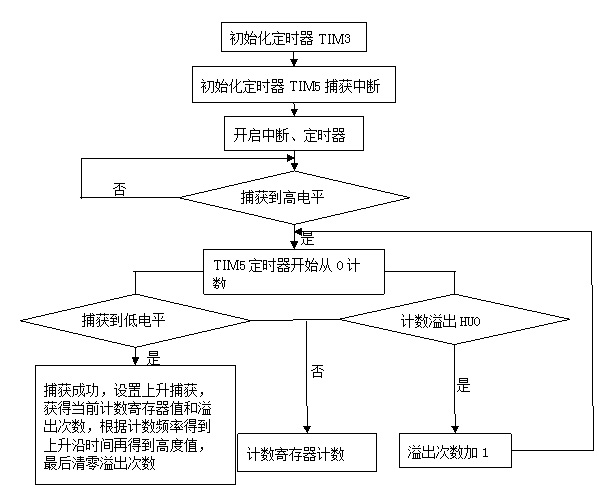
�D4-4 �߶șz�y���̈D 4.3.3 늙C�(q��)�ӳ����O(sh��)Ӌ늙C�����������w�����Ą�����Դ���oˢ늙C��Ҫ�c����{(di��o)������ϲ��܉��Æ�Ƭ�C�Ķ��r��ݔ����ͬռ�ձȵ�PWM������늙C���D(zhu��n)�٣����������Ҫ������{(di��o)�����M�г�ʼ���ij�����D4-5�� 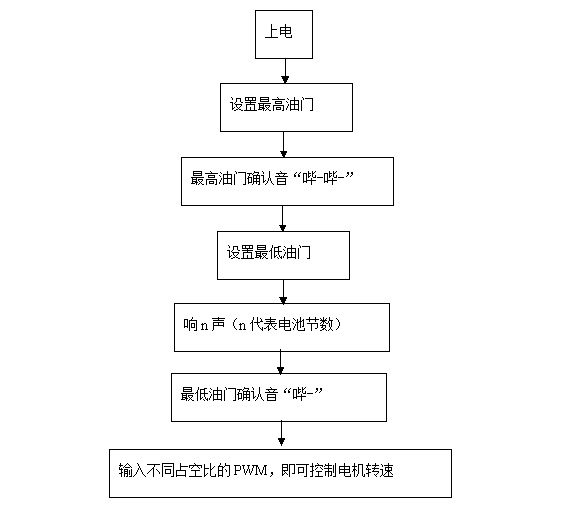
�D4-5 ����{(di��o)�����������̈D 4.3.4 �o����ݔ�O(sh��)Ӌ1.WiFiģ�K ����������D4-6�����ßo��wifi��ݔ������Ҫ����һ�������Д����APP�еĔ�(sh��)��(j��)ÿ�g��40ms�l(f��)��һ�Σ�ÿ�ΰl(f��)�Ͱ˂��ֹ�(ji��)�����ͨ�^���ځ�����WiFiģ�K�l(f��)���^�����ֹ�(ji��)��(sh��)��(j��)���������Д��M�Д�(sh��)��(j��)̎�����Y�x��ÿ�ΰl(f��)�͵�8���ֹ�(ji��)��(sh��)��(j��)�� Byte[0]����(sh��)��(j��)�^���̶���0x66�� Byte[1]�����������gֵ0x80����߅���� 0x00,��߅����0xff������0x00-0x80-0xff����׃���� Byte[2]�������棺���gֵ0x80����߅���� 0x00,ǰ߅����0xff������0x00-0x80-0xff����׃���� 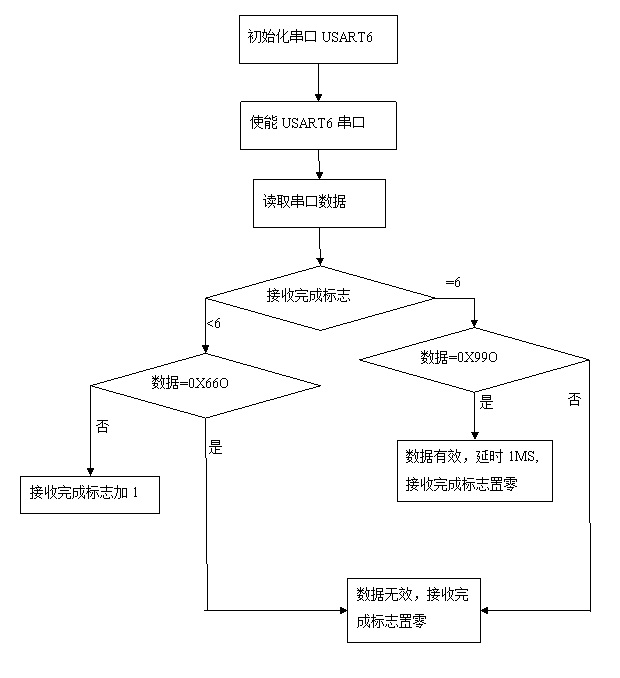
�D4-6 �����Д���(sh��)��(j��)̎�����̈D Byte[3]�����T��0x00����С��0xff����� Byte[4]������棺���gֵ0x80�����D(zhu��n)���� 0x00,���D(zhu��n)����0xff������0x00-0x80-0xff����׃���� Byte[5]����־λ��������ʹ��λ����ۙĿ������ʹ��λ�� Byte[6]��У��ֹ�(ji��)�� Byte[7]����(sh��)��(j��)β���̶���0x99�� ����yԇ���B�Ӻ�����(y��ng)��Ӳ�����B�Ӻ�WiFi�����_APP��(n��i)�Ŀ��ƽ��棬����λ�C�^�y�֙C�l(f��)�͵ij�ʼ��(sh��)��(j��)�Ƿ�ʴ_�İl(f��)�͵�����оƬ���ٻ������T���ˑB(t��i)�u�U���^�y����(y��ng)�Ĕ�(sh��)��(j��)�Ƿ����_������(sh��)��(j��)δ�l(f��)�͵���λ�C���z��Ӳ�����B�ӣ�����(sh��)��(j��)���e���z�鴮���Д���(n��i)��(sh��)��(j��)�Y�x������K�{(di��o)ԇ�����_�ij��� 2. nrf24l01+ģ�K ��1�����ՙC 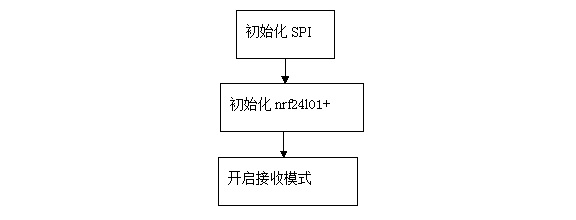
�D4-7 nrf24l01+���ճ������̈D ��2���b���� ����������D4-8��ʹ��nrf24l01+ģ�K�����H��Ҫ����ղ��֣�߀Ҫ�����b����������Ҫƥ����܉�ʹ�ã�nrf24l01+ģ�K��Ҫ������spiͨ�Žӿځ��c����оƬͨ�š�AD�D(zhu��n)����Ҫʹ������оƬ��(n��i)�����ɵ�AD �D(zhu��n)�����M���R�eģ�M�������D(zhu��n)���ɔ�(sh��)��������AD�ɘӕr߀���þ�ֵ�V����pС��(sh��)��(j��)���`� ����yԇ����ý����·���b�����·�����Ϲ���Դ�����w�����ϴ����c��X�˵���λ�C�B�ӡ������^�y��λ�C�г��F(xi��n)�b�����ij�ʼ��(sh��)��(j��)���ٓ܄��p�S�u�U�������С�Ƕȣ��^����λ�C�еĔ�(sh��)��(j��)���c�����е�Ŀ�˔�(sh��)ֵ�Ǻϣ�Ȼ�������ӓu�U���^��u�U��(sh��)��(j��)�Ǟ龀��׃�����C���b�����Ĕ�(sh��)��(j��)�܉�ɹ��İl(f��)�͵��w�����Ŀ������С� 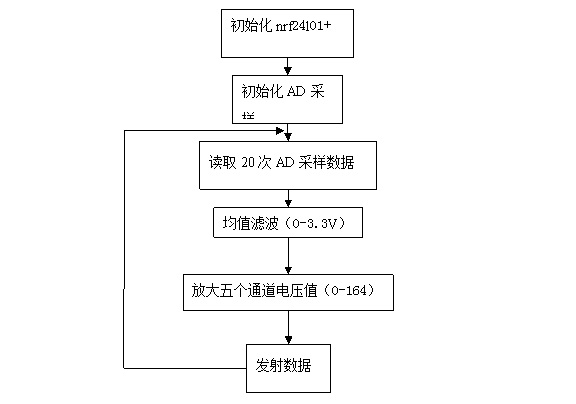
�D4-8 �b�����������̈D 4.3.5 PID�������O(sh��)ӋPID���������̈D��D4-9����������ݔ���������ĸ����ǡ��M�L�ǡ�����ǡ��߶��@�Ă���(sh��)��(j��)���ˑB(t��i)���������O(sh��)Ӌ���ô���PID�����h(hu��n)�ǿ����w�����ĽǶȣ��������������ǽǶȔ�(sh��)��(j��)����h(hu��n)��ݔ�������(n��i)�h(hu��n)��ݔ�룬��(n��i)�h(hu��n)�ķ������ˑB(t��i)�������Ľ��ٶȣ���(n��i)�h(hu��n)�ǿ����w�����Ƕ�׃�������ĭh(hu��n)��(ji��)�������w�����ķ�(w��n)���ԡ� �����ˑB(t��i)����ʹ�ô���PID���������چμ����ˑB(t��i)PID���������з����{(di��o)ԇ��푑�(y��ng)Ѹ�١�ݔ����(w��n)���ă�(y��u)�c����ͨ�^�߶�PID�����]�ϻ�·�����F(xi��n)���ˑB(t��i)���Ƶ�ͬ�r��(w��n)���w�����ĸ߶ȣ�������(w��n)���w�������w�и߶ȣ��w�������{(di��o)��(ji��)�ˑB(t��i)�r����ʹ��늙C��PWMֵ�����w����������ͣ�����Tֵ��ʹ���w���������F(xi��n)���ߵĬF(xi��n)��PID����������(sh��)��B��P����(sh��)��ʹϵ�y(t��ng)��׃������������푑�(y��ng)������������(sh��)�Ќ�ϵ�y(t��ng)���{(di��o)��(ji��)��������ģ�I����(sh��)��ʹϵ�y(t��ng)�܉�ʴ_�{(di��o)��Ŀ��ֵ��D����(sh��)�ǿ���ϵ�y(t��ng)�IJ��ӣ�����ϵ�y(t��ng)��Ŀ��ֵ�������F(xi��n)���ӣ�����ϵ�y(t��ng)�ķ�(w��n)���ԡ� ����yԇ�����ڴ˲���ģ�K����Ĝyԇ����Ҫ�õ��ˑB(t��i)�z�y�������Ĕ�(sh��)��(j��)���߶șz�y��(sh��)��(j��)�͟o����ݔ?sh��)Ĕ?sh��)��(j��)����ǰ���ģ�K���yԇͨ�^����r�²��܉��M�Мyԇ�����ڴ˲��ֳ���ֱ��Ӱ��w�������w���|(zh��)���������{(di��o)ԇ�¹�(ji��)Ԕ���v��yԇ�^�̡� 
�D4-9 PID���Ƴ������̈D 4.4 ����С�Y(ji��) ��Ҫ��B���_�l(f��)�h(hu��n)�����{(di��o)ԇܛ����ʹ�ã��ܛ��ϵ�y(t��ng)�����̈D���Լ���B��Ҫģ�K��������̣��Y(ji��)��Ӳ���yԇ����ģ�K����Ĺ��ܣ��C������Ӳ��ģ�K�Y(ji��)��ܛ���܉�?q��)��F(xi��n)����(y��ng)ģ�K�Ĺ��ܡ����(li��n)��ģ�K�����M��ϵ�y(t��ng)�C�Ϝyԇ���^������P(gu��n)�I����׃����r����ɳ���ϵ�y(t��ng)�O(sh��)Ӌ��
��5�� ϵ�y(t��ng)�{(di��o)ԇ
5.1 �{(di��o)ԇ���E
5.1.1 �ˑB(t��i)PID�{(di��o)ԇ�����ˑB(t��i)PID�Dz��ô�����˼·�����{(di��o)��(ji��)����(sh��)�r��Ҫ���{(di��o)��(ji��)��(n��i)�h(hu��n)����(sh��)���{(di��o)����h(hu��n)����(sh��)�������|(zh��)���ֲ����Q���������w��������Փ�����ĸ����Ǻ͙M�L�ǵ�PID���ƅ���(sh��)����ͬ�ģ������ڴ����r�M����������������ģ�͵Ď����ģ��@���������{(di��o)ԇ���������c������ƫ�x���h�����H��Ҫ���{(di��o)��(ji��)һ���S��PID����(sh��)��߀����������ƫ���(c��)��늙C�L�r�g̎���^�������D(zhu��n)����������늙C�p�ġ� ���{(di��o)��(ji��)�ˑB(t��i)PIDǰ����Ҫ�w����Ó�x���棬�����M���ˑB(t��i)�^�y�������Ҫ��Ӌ�w�����Ĵ������w���T�� ���Ȍ���h(hu��n)���Ѕ���(sh��)���㣬������������(n��i)�h(hu��n)�����������σ�(n��i)�h(hu��n)P����(sh��)�����P̫С�����F(xi��n)�鲻���������ٶ��`����܉��{(di��o)��(ji��)�Aб����r�����Pֵ�^��������w��������ʎ��ԓ��ʎ���ҕr�������w�����o���������w��������{(di��o)��(ji��)P����(sh��)�rһ���С���_��׃�������^���w�����Ĕ[����r�����m��Pֵ�����܉����(j��)�����������������(y��ng)��ͬ�r�ֲ���̫��ʎ�� P����(sh��)�{(di��o)�����m��ϵ�y(t��ng)���ܲ�����Ŀ��λ����ʎ���˕r����I����(sh��)��I����(sh��)�����þ���ʹϵ�y(t��ng)�܉��_Ŀ��ֵ���������Iֵ��ʹ��ϵ�y(t��ng)�ڸ���Ŀ��ֵ�ą^(q��)��l(f��)���p��ʎ���^С��Iֵ����ʹ��ϵ�y(t��ng)푑�(y��ng)����(w��n)���r�g�L����˺��m��Iֵʹϵ�y(t��ng)���҂��A(y��)���Ŀ��ֵ������ �����w�����ˑB(t��i)�������ǶȰl(f��)����ʎ����r������Ҫϵ�y(t��ng)�܉��A(y��)�y��һ�r�̵��ˑB(t��i)څ�ݣ���pС��ʎ����˼���D����(sh��)��D����(sh��)��ʹ�Õ�ʹ���w�����ˑB(t��i)�������F(xi��n)�[�ӣ�����ȥ�w����ʮ�ֵķ�(w��n)���� Ȼ����������еă�(n��i)�h(hu��n)����(sh��)���{(di��o)��(ji��)��h(hu��n)����(sh��)����h(hu��n)���ǽoϵ�y(t��ng)ݔ��һ���������ˑB(t��i)�Ƕȣ���ͨ�^��h(hu��n)PID���ƣ����w������(w��n)�����������ˑB(t��i)�Ƕȡ�������h(hu��n)PID����(sh��)���{(di��o)��(ji��)�������w�������ˑB(t��i)�Dz���ˮƽ���w�������S���u�U�ķ���l(f��)��ˮƽ�Ƅӣ���˲��á������S���ķ�����D5-1����ÿ���S�M���{(di��o)��(ji��)���{(di��o)��(ji��)�^���c��(n��i)�h(hu��n)��ͬ���^�y�w�����������Ƕȵ��w����r���ڷքe�{(di��o)���������S��PID����(sh��)������ÿ���S֮�g���������ԣ�ÿ���S�ą���(sh��)֮�g���Ӱ푣������Ҫ�����Sһ���{(di��o)��(ji��)��D5-2����K�{(di��o)ԇ���m���w�е�����PID����(sh��)�� 
�D5-1 �������S���{(di��o)ԇ�����D 
�D5-2 ���w�{(di��o)ԇ�D 5.1.2 �߶�PID�{(di��o)ԇ�{(di��o)��(ji��)�߶�PID�r��Ҫ�����T�Ӵ��w�����܉�Ó�x���棬���_�b�����Ķ��߰��o���ف��^���w�����ĸ߶�׃���� �����{(di��o)��(ji��)P����(sh��)����I��D����(sh��)���㣬�ڳ����{(di��o)ԇ�r���ڳ����(n��i)���O(sh��)��Ŀ�˸߶Ȟ�50cm��P����(sh��)��С�����{(di��o)�������{(di��o)��(ji��)�^���У������F(xi��n)�w����ƫ�xĿ�˸߶��^�h���w����Ҳ�]�����@�������½�څ�ݵ���r���˕r�f��P����(sh��)�^С�{(di��o)��(ji��)���Ȳ��������F(xi��n)�w�����߶���ʎ����Խ��Խ���f��Pֵ�^������ϵ�y(t��ng)�l(f��)ɢ�����m��С��Pֵ�Ǯ��w����ƫ�xĿ�˸߶��^�h�r���w�����܉�Ѹ�ٷ���(y��ng)���������½���ͬ�r��һ���߶ȷ�����(n��i)��ʎ�� Ȼ��_��I����(sh��)��ʹ�w�����܉��{(di��o)��(ji��)��Ŀ�˸߶ȣ����w�����ܾòŷ�(w��n)����Ŀ�˸߶ȣ��f��I����(sh��)ֵ�^С�����w�������F(xi��n)�^С������ʎ���f��I����(sh��)�^����˺��m��I����(sh��)����ʹ���w�����܉��{(di��o)����Ŀ�ĸ߶ȡ� ���_��D����(sh��)���Ӹ߶ȿ��Ƶķ�(w��n)���ԣ�ԓֵ��С���������{(di��o)ԇ�����m��С��Dֵʹ���w������Ŀ�˸߶�ʮ�ַ�(w��n)���� 5.1.3 λ�ÿ����{(di��o)ԇ�����T�����w����Ó�x���棬�_������ģʽ���ٰ���λ���I�M��λ�ÿ��ơ�����λ�ÿ����ǽY(ji��)���ˑB(t��i)���Ƶij��m(x��)�r�g�������w����ˮƽ�Ƅӵľ��x������ڹ̶��ĸ����ǡ��M�L�����M��λ���Ƅӣ����{(di��o)��(ji��)���^������Ҫ����(j��)���H���x�Ŀ��Ƴ����е�ѭ�h(hu��n)�Δ�(sh��)�� ���{(di��o)��ˮƽ�����λ�ÿ��Ƴ��̶��w������Ŀ���w�о��x������(j��)���H�w�о��x�{(di��o)������(y��ng)��ѭ�h(hu��n)�Δ�(sh��)��Ȼ���׃Ŀ�˾��w���^�y���H�w�о��x�Ƿ�ʴ_�������`��{(di��o)ѭ�h(hu��n)�Δ�(sh��)���� ���{(di��o)��(ji��)�߶ȿ��ƣ��{(di��o)��(ji��)���E�cˮƽλ���{(di��o)��(ji��)��ơ� ��ɂ��h(hu��n)��(ji��)��Y(ji��)�ϣ��ڳ������w��������ˮƽλ�ÿ��ƣ����Ǹ߶ȿ��ơ� 5.1.4 �{(di��o)ԇ�Y(ji��)����(j��ng)�^�������ˑB(t��i)PID����(sh��)���������õ���5-1�ͱ�5-2��(sh��)��(j��)���w�������ˑB(t��i)���������@�����ã��܉���Ч�Ŀ����w�������w���ˑB(t��i)��D5-3��5-4��5-5��5-6��5-7��5-8��5-9��5-10��5-11��5-12�������چμ�PID���Ƶĸ߶ȭh(hu��n)��(ji��)���܉��{(di��o)��(ji��)�������߶ȣ������������߶ȸ��������@�IJ��ӡ�λ�ÿ��ƭh(hu��n)��(ji��)�ܸ߶ȭh(hu��n)��Ӱ푣�λ�ÿ�����߀����һ���`����߶ȿ��ƭh(hu��n)�{(di��o)�ã�λ�ÿ����`��܉���Ч���͡� ��5-1 �ˑB(t��i)��h(hu��n)PI����(sh��)��
��5-1 �ˑB(t��i)��(n��i)�h(hu��n)PD����(sh��)�� 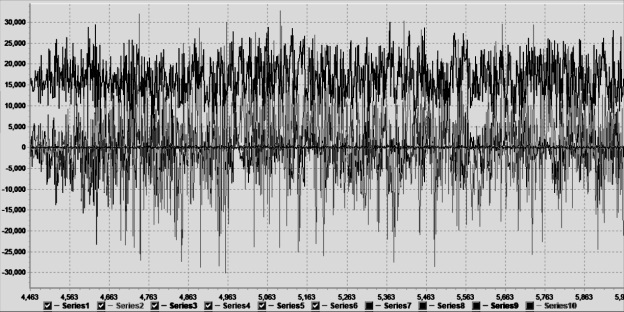
�D5-3 ���S���ٶȺ����S���݃x��(sh��)��(j��)�����D �ڈD5-3�У��M�����Ǖr�g�S����λ�� ���r�g��(sh��)��(j��)���U����100�����v�����Ǽ��ٶȺ����݃x��(sh��)��(j��)����λ�քe�� ���r�g��(sh��)��(j��)���U����100�����v�����Ǽ��ٶȺ����݃x��(sh��)��(j��)����λ�քe�� �� �� �� �� 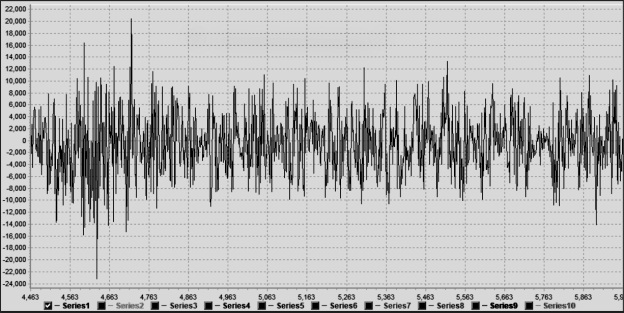
�D5-4 X�S���ٶȔ�(sh��)��(j��)�����D �ڈD5-4�У��M�����Ǖr�g�S����λ�����r�g��(sh��)��(j��)���U����100�����v������X���ٶȔ�(sh��)��(j��)���U����16384������λ���� 
�D5-5 Y�S���ٶȔ�(sh��)��(j��)�����D �ڈD5-5�У��M�����Ǖr�g�S����λ�����r�g��(sh��)��(j��)���U����100�����v������Y���ٶȔ�(sh��)��(j��)���U����16384������λ���� 
�D5-6 Z�S���ٶȔ�(sh��)��(j��)�����D �ڈD5-6�У��M�����Ǖr�g�S����λ�����r�g��(sh��)��(j��)���U����100�����v������Z���ٶȔ�(sh��)��(j��)���U����16384������λ���� 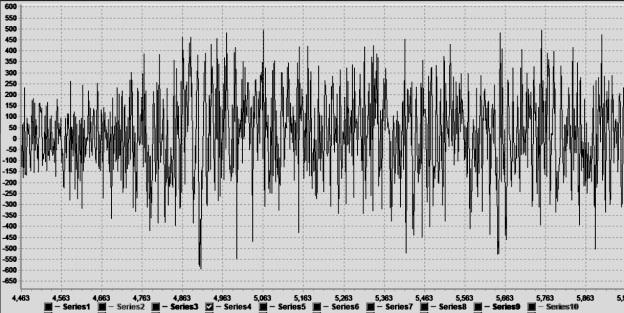
�D5-7 X�S���݃x��(sh��)��(j��)�����D �ڈD5-7�У��M�����Ǖr�g�S����λ�����r�g��(sh��)��(j��)���U����100�����v������X���݃x��(sh��)��(j��)���U����16.4������λ���� 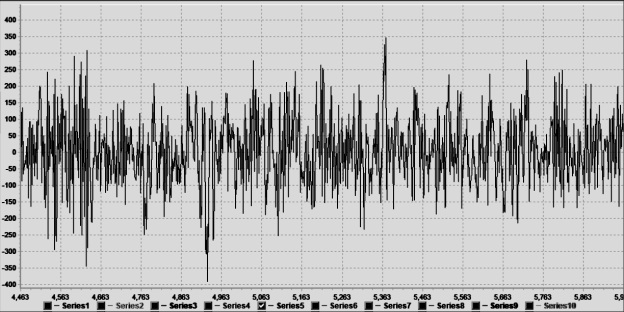
�D5-8 Y�S���݃x��(sh��)��(j��)�����D �ڈD5-8�У��M�����Ǖr�g�S����λ�����r�g��(sh��)��(j��)���U����100�����v������Y���݃x��(sh��)��(j��)���U����16.4������λ���� 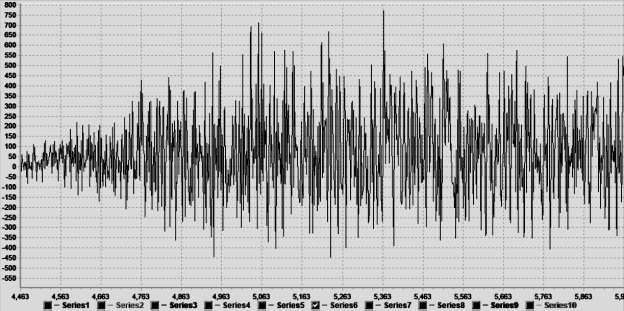
�D5-9 Z�S���݃x��(sh��)��(j��)�����D �ڈD5-9�У��M�����Ǖr�g�S����λ�����r�g��(sh��)��(j��)���U����100�����v������Z���݃x��(sh��)��(j��)���U����16.4������λ���� 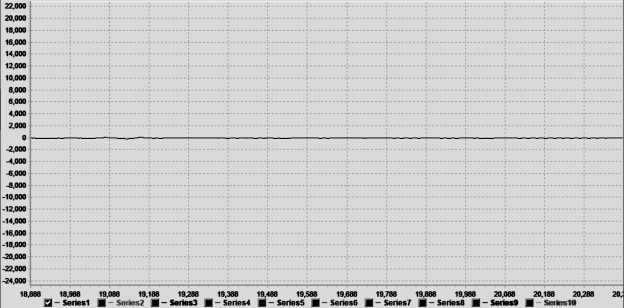
�D5-10 �M�L��(sh��)��(j��)�����D �ڈD5-10�У��M�����Ǖr�g�S����λ�����r�g��(sh��)��(j��)���U����100�����v�����ǙM�L�ǶȔ�(sh��)��(j��)���U����100������λ�Ƕȡ� 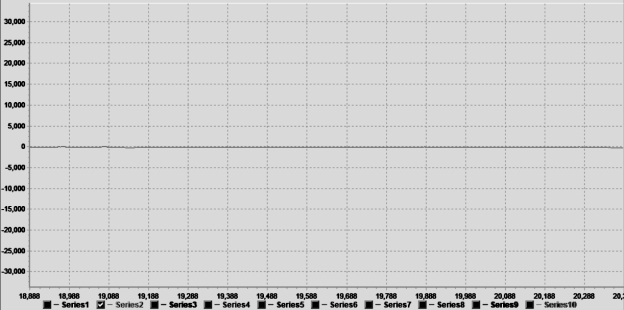
�D5-11 ������(sh��)��(j��)�����D �ڈD5-11�У��M�����Ǖr�g�S����λ�����r�g��(sh��)��(j��)���U����100�����v�����Ǹ����ǶȔ�(sh��)��(j��)���U����100������λ�Ƕȡ� 
�D5-12 ƫ����(sh��)��(j��)�����D �ڈD5-12�У��M�����Ǖr�g�S����λ�����r�g��(sh��)��(j��)���U����100�����v������ƫ���ǶȔ�(sh��)��(j��)���U����100������λ�Ƕȡ� �ĈD5-10��5-11��5-12�п��Կ����w�������Է�(w��n)��B(t��i)�£������Ǻ͙M�L�Ƕ����ƺܺã�������������ϡ�Ȼ��ƫ���Ƕȿ��������x��ȝu�u׃�h����Ҋ�w�������ھ�������������������rᘡ�������w�������ˑB(t��i)��������ƫ���ǿ���߀����һ�����`� 5.2 ���y���}����Q����
5.2.1 �ɂ��o��ģ�K��ɔ_�ڌ��H�yԇ������^���У����F(xi��n)WiFiģ�K�ij�ʼ��(sh��)��(j��)С���ʱ��ɔ_���������ڳ�ʼ���w�����ʂ����wǰ���w���������F(xi��n)ʧ�ء� ��Q�������w����ʧ���dz��F(xi��n)�ڼ���o���^����_�P(gu��n)����F(xi��n)�����o���^�����Ʒ�Ƕ�̎��315M��WiFi��ݔ�l����2.4G������Փ�ρ��v�ɂ��l�ε���̖�Dz����l(f��)���ɔ_����˱��ڳ������M�Ѓ�(y��u)�������M�����wǰ����WiFi��ʼ��(sh��)��(j��)�ж�����(sh��)�����ɔ_��̖�M�Дr�أ�ֻ�Ю��b�����ij�ʼ��(sh��)��(j��)�l(f��)�͵��w�����ϲ��M�����w�;w�A�Ρ��@�Ӿ��܉�沢ʹ�ßo���^���ģ�K�����ܴ_���������F(xi��n)��(sh��)��(j��)�e�`�� 5.2.2 ���ذ����ӄ��������ذ尲�b�ڙC���ϣ�����늙C�Ą����D(zhu��n)�Ӻ͙C�ܵęCе�Y(ji��)��(g��u)ʹ���·���ϵ�����ʮ�ք��ң���MPU-6050�ˑB(t��i)��������Ӱ��^�� ��Q����������ĭ�z�B���·���c�C�ܣ��܉�����·���c�C�ܵ�ֱ�ӽ��|��ͨ�^��ĭ�z���C�ܵ����ӵ�����һ���֣���Ч�ĜpСMPU-6050�ϵ����ӡ� 5.2.3 ����늙C�ԙzʧ���ڼ��밴�I�@ʾ�����ijЩ늙C�o���ԙz��Ӱ��������D(zhu��n)�ӡ� ��Q�������ԙzʧ����늙C���S�C�ġ����̶�������J��������{(di��o)�����Ŀ��ƾ�δ�B�Ӻã����Ǻ��ٳ��F(xi��n)�Ă�늙C��ȫ�ԙzͨ�^����r����˿��]������Y(ji��)��(g��u)���}��ȥ�����I�@ʾ������Ă�늙C���܉�ɹ��ԙz�������I�@ʾ�������늙C�ԙz�����Ҳ�ܱ����@�����}����˸��ij����ʼ�������ܽ�Q�� 5.2.4 �w����Ó�x����l(f��)���h���w���������T���(q��)�����܉�ƽ��(w��n)��Ó�x���棬�����ڷ�(w��n)�����T���w�������dz�ijһ�����Ƅӣ��o�����^�õķ�(w��n)���ڳ�ʼλ�á� ��Q�������z���w�����ij�ʼ�Ƕȸ�����0�ȡ��M�L��0�ȡ������0�ȣ�����������ֵ���z���b�������ˑB(t��i)��(sh��)��(j��)Ҳ������ֵ��(sh��)��(j��)�������ڳ����еĔ�(sh��)��(j��)��δ�l(f��)�F(xi��n)�������ڜyԇ�аl(f��)�F(xi��n)���F(xi��n)�h�ݵ��w��������ͨ�^�b����ݔ���ˑB(t��i)���C������ˌ��ˑB(t��i)��(sh��)��(j��)�M���a����������Ч�ı����w���������@�h�ơ� 5.2.5 ���T�������w��������yԇ�У����T���U̫�^�`���������ڿ����w���������w���T�� ��Q�������@�����}Դ���Լ�ʹ�õ�늙C�D(zhu��n)���^�ߣ����~�^����ɣ�늙C�ڵ��D(zhu��n)�����w����Ҳ�܉�@���^����������ڌ��H�yԇ�У����U�����T���ķ�֮һ̎�����w�x���棬��˞齵�����T���`���ȣ���[1000-2000]�����T����ֻ����[1000-1500]�����܉�ܺõĿ������w�����䡣 5.3 ������D5-13�����Ƶ��b��������Ҫ���USB��늣���߅�u�U�Ƿ�����ƣ���߅�u�U�����T������ǿ��ơ��������w������D5-14�������е��·������һ�K�����壬ֻ��Ҫ����늳غͽo����{(di��o)������늾���ʹ�w���������������������ϵ����U���Á��o���{(di��o)ԇ�� 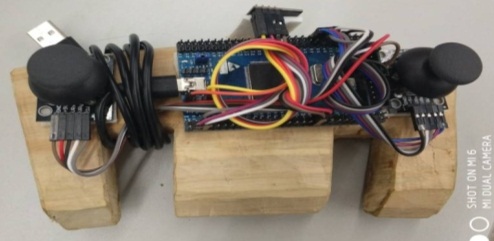
�D5-13 �b��������D 
�D5-14 �w��������D 5.4 ����С�Y(ji��)���½�B���������w�����Č����{(di��o)ԇ�^�̼���K�{(di��o)ԇ�Y(ji��)�����{(di��o)ԇ�������Ć��}����Q�������C��ͨ�^���ĵ��O(sh��)Ӌ˼·�Y(ji��)���{(di��o)ԇ�^�����܉�����������w�������ˑB(t��i)���ơ�
�����w������һ�����^���ϵ�y(t��ng)����Ӳ���xȡ�r��Ҫ�м����]Ӳ�����Ć��}���e��늳ء�����{(di��o)������늙C�����~����̖�M�ϣ��@�����c���Ʋ��֟o�P(gu��n)������̖�xȡ���ú�������Ӳ��������Ȼ������w�����Ͽ��Ʋ���Ӳ���·���@�����O(sh��)Ӌ��Ҫ�Y(ji��)��ܛ���O(sh��)Ӌ�������ģ�K��Ӳ���·��ͨ�^ܛӲ��(li��n)�Ϝyԇ����ģ�K�Ĺ��ܡ�������wܛӲ�����O(sh��)Ӌ��
�ڴ˴��w�������O(sh��)Ӌ������Ҫ���ǿ��������O(sh��)Ӌ�������ˑB(t��i)���Ƶ��O(sh��)Ӌ���ô���PID�ļܘ�(g��u)��ͨ�^���H������������{(di��o)ԇ���C��ͨ�^�@�N�ܘ�(g��u)���H�{(di��o)ԇ���㣬���ҿ�������ݔ�����^��(w��n)�����ˑB(t��i)����˲��ô���PID���ˑB(t��i)���Ʋ����ǿ��еġ����ڸ߶ȿ��������ÆΘOPID�O(sh��)Ӌ˼·���ڌ��H�{(di��o)ԇ�^���Іμ�PID�_�������{(di��o)ԇ���^������PID��Ҫ������ĕr�gȥ����PID����(sh��)��������ݔ��Ҳ���_���^�õķ�(w��n)��Ч��������λ�ÿ��ƣ�����δʹ�ù���Ԫ���M�ж�λ���w�������ܽ����Լ���λ������ϵ�����o����λ�ÿ��������]�h(hu��n)���������Լ��O(sh��)Ӌ�ķ�����ֻ���_�h(hu��n)�����w�����Ĵ��λ�ã��{(di��o)ԇ�^��Ҳ�����]�h(hu��n)���Σ������_�h(hu��n)����ֻ�džμ���λ�ø�׃��Ҳ߀���ܫ@�ò��e�Ŀ���Ч����
�ڱ��O(sh��)Ӌ��߀�кܶ�ط�ֵ�����ƣ��߶�PID߀���܉�(w��n)���ʴ_�Č��w�����߶ȿ����������߶ȣ��߶�PID�{(di��o)ԇ�ã�������Ч�Ŀ����w�����ĸ߶ȣ������w�����������ߣ����܉�?q��)��F(xi��n)��ͣ�Ĺ��ܡ���λ�ÿ�����Ҳ���ںܴ���`��w�������܉��֪�����ϵK���λ�ÿ����������]�h(hu��n)ϵ�y(t��ng)�����܉���Ч�ʴ_�Ŀ����w������λ�ã��ٽY(ji��)�ϱ��ϵȹ��ܾ��܌��F(xi��n)Ó�x�b������ȫ���x�ϵ������w�С�߀�в��õ�WiFi�o����ݔ�������xС���w�����Ŀɲ����������ߣ��w������Ҳδ���Ԅӷ����Ĺ��ܣ�������װl(f��)�����C�����֙CAPP�����w�����^���ֱ������w�������y�ȸ��ߣ����֙C���ƕr���X�����u�U�ľ��wƫ�x�̶ȣ��ڌ��H������߀��Ҫһ߅�^�y�֙Cһ߅�^���w������߀���܉������ܺõIJ����w������
����δ�����w�������oՓ�IJ��ϡ��������Y(ji��)��(g��u)�϶������ӳ��죬�����������w�������w�п��ƣ����ɔ_������ؓ������Խ��Խ���������m��(y��ng)�ڏ�(f��)�s�h(hu��n)���¹������S���������ľ���Խ�ߣ��w�������ˑB(t��i)���ƺ�λ�ÿ����ϵķ�(w��n)������Խ�á��`��ҲԽС��ͬ�r�S��늳��ИI(y��)���M�����������w�������m(x��)������Ҳ�����������F(xi��n)���õ����I(y��)�r�g��
ȫ���Y��51hei���d��ַ��
 keil5_code.7z
(434.19 KB, ���d��(sh��): 167)
keil5_code.7z
(434.19 KB, ���d��(sh��): 167)
2021-3-5 22:12 �ς�
�c���ļ������d����
���d�e��: �ڎ� -5
 С���������w���ˑB(t��i)��λ�ÿ���ϵ�y(t��ng)�O(sh��)Ӌ�c���F(xi��n).doc
(11.93 MB, ���d��(sh��): 135)
С���������w���ˑB(t��i)��λ�ÿ���ϵ�y(t��ng)�O(sh��)Ӌ�c���F(xi��n).doc
(11.93 MB, ���d��(sh��): 135)
2021-3-5 09:56 �ς�
�c���ļ������d����
���d�e��: �ڎ� -5
| 



 [��(f��)��朽�]
[��(f��)��朽�]

 ����TQQ:125739409;���g(sh��)����QQȺ281945664
����TQQ:125739409;���g(sh��)����QQȺ281945664





 QQ���Ѻ�Ⱥ
QQ���Ѻ�Ⱥ QQ���g
QQ���g �vӍ��
�vӍ�� �vӍ����
�vӍ���� �ղ�
�ղ� ����
���� �
� ��
��
