標題: 我的移動偵查小車(多圖附程序) [打印本頁]
作者: dagu 時間: 2014-12-27 01:40
標題: 我的移動偵查小車(多圖附程序)
在猶豫是做飛機還是小車很久以后,終于選擇做一個移動機器人。原因有以下幾點:1,飛機消耗太大。2,飛機空機無法DIY,少了樂趣。3,場地有限。4,和我的專業結合不緊密。5,輪式驅動好控制。
生活少了許多自由的時間,所以擠擠晚上睡覺的時間花了大約3周基本實現了機器人的移動控制,視頻傳輸。在以后會加上機械臂,各種傳感器,如果有可能還會弄弄視覺識別。
之所以說是移動機器人,是因為本身的定位比較高,我不希望用廉價的材料做出一個試驗型的小車。我要做就做實用的,一步到位的。錢倒不是什么問題,每個月的錢就夠買材料的。只是很多機械結構沒有條件自己做,所以只好用成品。興趣是最好的老師,重在過程不在結果。
下面介紹我的車,由于做出來沒多久還有很多不足的地方,下一步就是要換一個更長的地盤,用6輪驅動,換大輪。
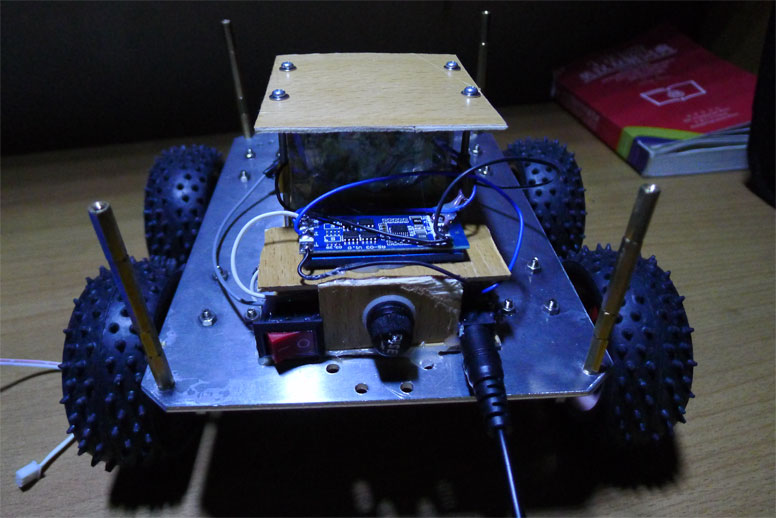
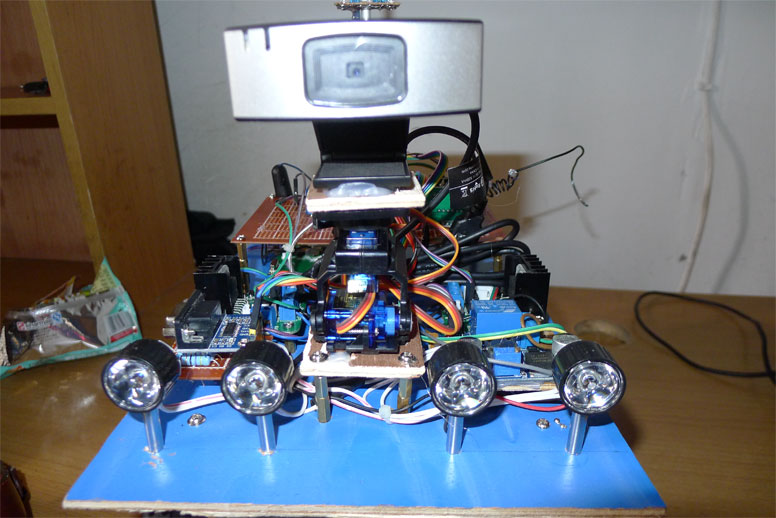
下面是基本完成后的小車:

完成了視頻傳輸的小車,平板電腦里面可以看到小車攝像頭拍到的視頻。
下面是各個部件:

1,TP-LINK 路由器 刷固件后用來進行圖傳和數傳。淘寶上價格在150左右,已經刷好了固件。

2,S606高清攝像頭 USB接頭,淘寶價在80左右

3,裝好2自由度舵機云臺的攝像頭
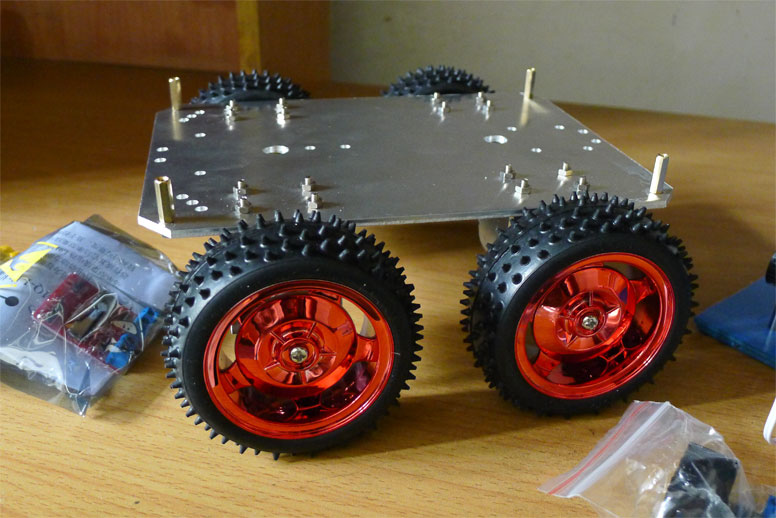
4,裝好的小車底盤。85MM輪,37MM電機,20X15CM底盤。
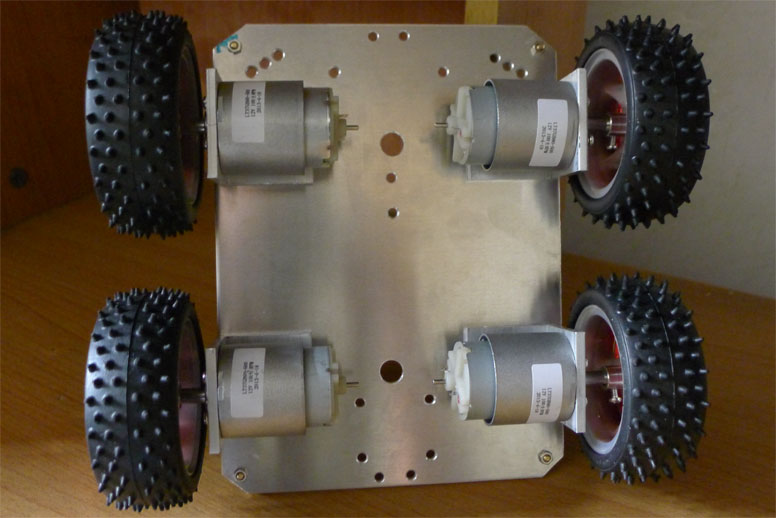
5,小車底盤和37金屬電機。金屬電機24元一個,輪12元一個。

6,L298電機驅動模塊
7,安裝好電池和保護板及充電電路。
8,九節18650鋰電形成的電池組。3并3串,11.2V
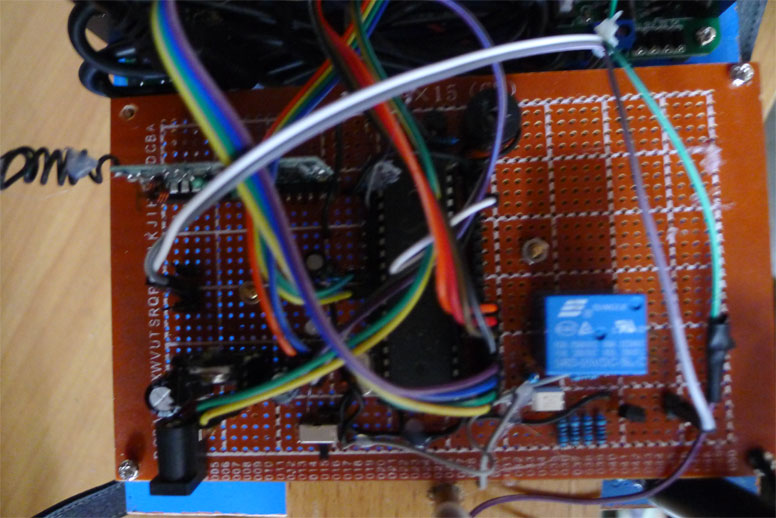
9,控制電路。采用STC89C52單片機。
10,上板前視圖。有四個LED大燈
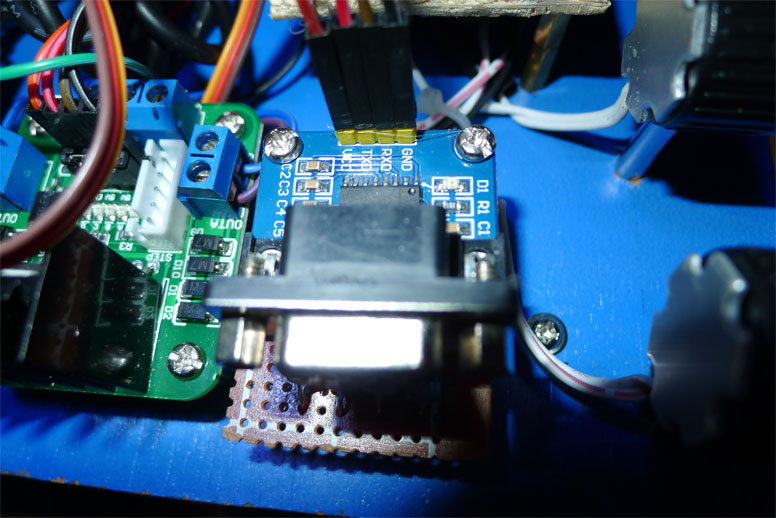
11,RS232電平轉換模塊
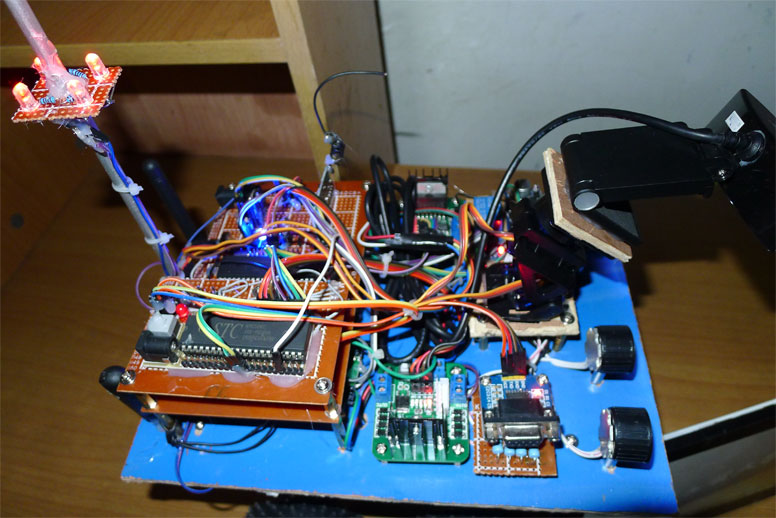
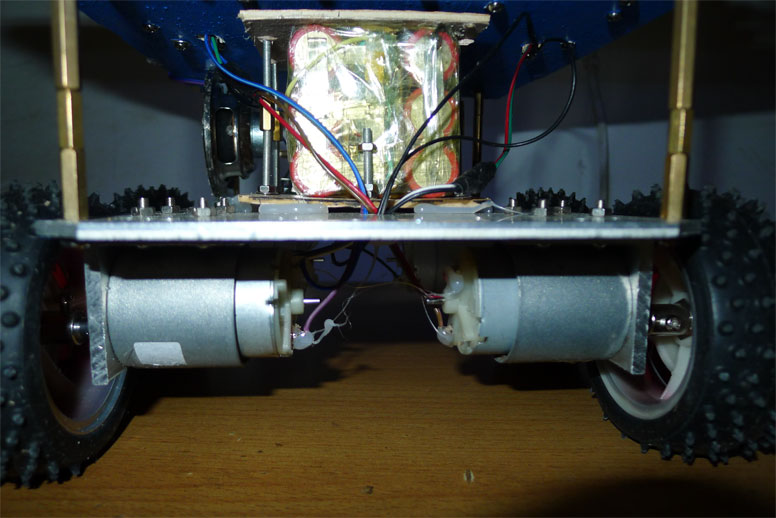
12,整機仰視圖
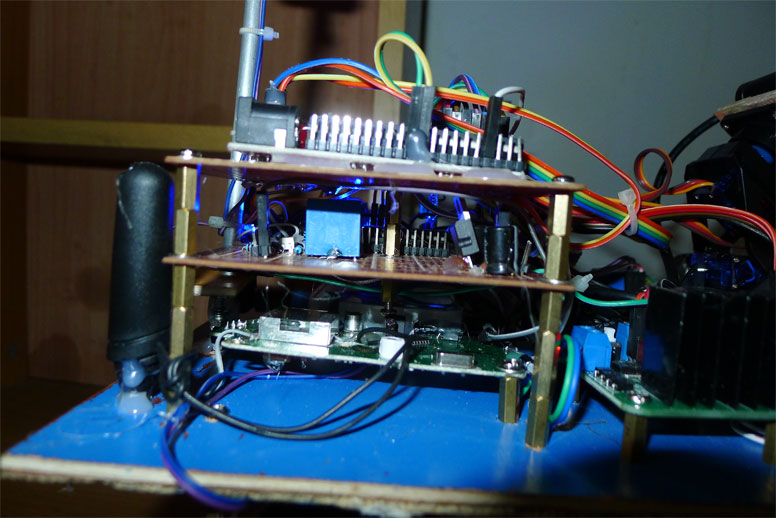
13,上底板三層積木構架
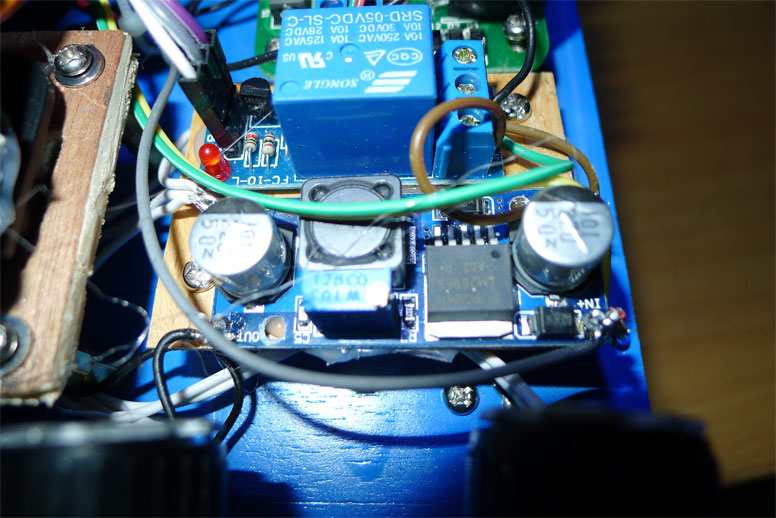
14,繼電器和限流降壓模塊。
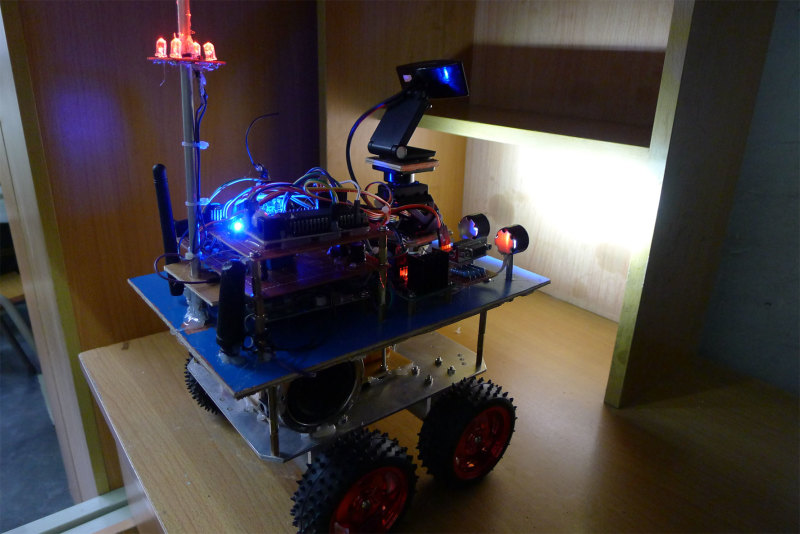
15,整機圖
下面介紹一下小車的基本原理
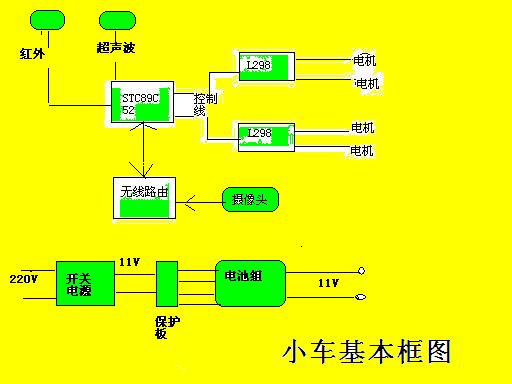
一,小車的圖傳和數傳原理:
本小車采用開源的無線路由器進行圖傳和數傳。圖傳主要是將攝像頭視頻通過路由器傳輸到上位機上。數傳主要是用上位機軟件進行小車的控制,如行走,轉彎。
關于路由器的固件刷機,參照網址:http://www.wifi-robots.com/。
二,小車的下位機控制部分:
本著DIY的目的,采用了51單片機加L298電機驅動。具體采用了STC89C52單片機。具體C源程序在后面,已通過測試。
三,小車的底盤部分:
采用6061鋁,37MM金屬減速電機,85MM輪。采用四輪驅動。
四,小車電源部分:
采用9節18650鋰電。通過實際運行動力強勁,續航強。電池采用3X3連接,共11V輸出。電源部分設計了充電保護板和輸出保險設計。
五,大燈電路;
采用四個大功率LED,繼電器模塊和限流模塊。
六, 設計了對講機電路
七,還未設計紅外避障,超聲波測距等
附51單片機源程序:
- #include<reg52.h>
- #include<math.h>
- #include<intrins.h>
- #define uchar unsigned char
- #define uint unsigned int
- uchar Buffer =0; //從串口接收的數據
- uint URTAReceivedCount=0,n=1;
- uchar data Tempdatatable[5],CommandDatatable[5];//數據包
- uchar serVal[2];
- uint pwm[]={1120,1190,1382,1382,1382,1382,1382,1382}; //初始90度,(實際是1382.4,取整得1382)
- uchar pwm_flag=0;
- uint code ms0_5Con=461; //0.5ms計數 (實際是460.8,取整得461)
- uint code ms2_5Con=2304; //2.5ms計數
-
-
- bit key_stime_ok;
- sbit StatusLight=P3^6; //狀態燈
- sbit MainLight=P3^7; //主大燈
- sbit servo0=P0^0; //舵機控制
- sbit servo1=P0^1;
- sbit servo2=P0^2;
- sbit servo3=P0^3;
- sbit servo4=P0^4;
- sbit servo5=P0^5;
- sbit servo6=P0^6;
- sbit servo7=P0^7;
- /********************************************************************
- * 名稱 : Delay_1ms()
- * 功能 : 延時子程序,延時時間為 1ms * x
- * 輸入 : x (延時一毫秒的個數)
- * 輸出 : 無
- ***********************************************************************/
- void Delay_1ms(uint i)//1ms延時
- {
- uchar x,j;
- for(j=0;j<i;j++)
- for(x=0;x<=148;x++);
- }
-
- void TurnOnStatusLight()
- {
- StatusLight=0;
- }
- /********************************************************************
- * 名稱 : Send_Data()
- * 功能 : 向上位機傳送字符
- * 輸入 : 無
- * 輸出 : 無
- ***********************************************************************/
- void Send_Data(uchar type,uchar cmd,uchar dat)
- {
- uchar data Buffer[5];//構建數據包
- uchar *p;
- uint Send_Count=0;
- p = Buffer;
- Buffer[0]=0XFF;
- Buffer[1]=type;
- Buffer[2]=cmd;
- Buffer[3]=dat;
- Buffer[4]=0XFF;
- while(1)
- {
- if(*p==0XFF)
- {
- Send_Count++; //0XFF標志統計位
- }
- SBUF = *p; //發送
- while(!TI) //如果發送完畢,硬件會置位TI,等待發送完畢
- {
- _nop_();
- }
- p++;
- TI = 0;
- if(Send_Count == 2) //當統計到兩次出現0XFF,則認為一個數據包發送完畢,跳出循環
- {
- TI = 0;
- break;
- }
- }
- }
- /********************************************************************
- 協議規定:
- 包頭 類型位 數據位 數據位 結束位
- 0XFF 0X** OX** 0X** 0XFF
- 各命令說明:
- 類型位 數據位 數據位 功能
-
- 0X00 0X02 0X00 前進
- 0X00 0X01 0X00 后退
- 0X00 0X03 0X00 左轉
- 0X00 0X04 0X00 右轉
- 0X00 0X00 0X00 停止
-
- 0X01 0X01 角度 舵機1
- 0X01 0X02 . 舵機2
- 0X01 0X01 . 舵機3
- 0X01 0X02 . 舵機4
- 0X01 0X01 . 舵機5
- 0X01 0X02 . 舵機6
- 0X01 0X01 . 舵機7
- 0X01 0X02 數據 舵機8
-
- 0X02 0X01 車燈亮
- 0X02 0X02 車燈滅
-
- 0X03 雷達數據 發送雷達數據
- ***********************************************************************/
- /********************************************************************
- * 名稱 : Com_Int()
- * 功能 : 串口中斷子函數
- ***********************************************************************/
- void Com_Int(void) interrupt 4
- {
- uchar temp;
- ES=0; //關串口中斷
- RI=0; //軟件清除接收中斷
- temp=SBUF;
- if(temp==0XFF && URTAReceivedCount<3)
- {
- Tempdatatable[0]==0XFF; //包頭
- URTAReceivedCount++;
- }
- else
- {
- Tempdatatable[n]=temp;
- n++;
- if(URTAReceivedCount==0&&n==2)
- n=1;
- }
-
- if(URTAReceivedCount==2)//包尾
- {
- Tempdatatable[0]=0XFF;
- Tempdatatable[4]=0XFF;
- n=1;
- URTAReceivedCount=0; //組包完畢
- temp="";
- // Send_Data(Tempdatatable[1],Tempdatatable[2],Tempdatatable[3]); //發送組成的數據包回去
- }
-
- CommandDatatable[0]=Tempdatatable[0];
- CommandDatatable[1]=Tempdatatable[1];
- CommandDatatable[2]=Tempdatatable[2];
- CommandDatatable[3]=Tempdatatable[3];
- CommandDatatable[4]=Tempdatatable[4];
-
- ES=1;//開串口中斷
-
-
- }
-
- /********************************************************************
- * 名稱 : Com_Init()
- * 功能 : 串口初始化,晶振11.0592,波特率9600,使能了串口中斷
- ***********************************************************************/
- void Com_Init(void)
- {
- TMOD = 0x21;
- PCON = 0x00;
- SCON = 0x50;
- TH1 = 0xFd; //設置波特率 9600
- TL1 = 0xFd;
- TR1 = 1; //啟動定時器1
- ES = 1; //開串口中斷
- EA = 1; //開總中斷
- IT0=0;
- EX0=1;
- }
-
- /********************************************************************
- * 名稱 :Moto_Forward()
- * 功能 : 電機1、2啟動,都是前進,整車表現為前進。
- ***********************************************************************/
- void Moto_Forward()
- {
- P2= 0x55;
- Delay_1ms(100);
- }
- /********************************************************************
- * 名稱 :Moto_Backward()
- * 功能 : 電機1、2啟動,都是后退,整車表現為后退。
- ***********************************************************************/
- void Moto_Backward()
- {
-
- P2= 0xaa;
- Delay_1ms(100);
- }
-
- /********************************************************************
- * 名稱 :Moto_TurnLeft()
- * 功能 : 電機1后退,電機2前進,整車表現為左轉。
- ***********************************************************************/
- void Moto_TurnLeft()
- {
- P2= 0x69;
- Delay_1ms(100);
- }
- /********************************************************************
- * 名稱 :Moto_TurnRight()
- * 功能 : 電機1前進,電機2后退,整車表現為右轉。
- ***********************************************************************/
- void Moto_TurnRight()
- {
- P2= 0x96;
- Delay_1ms(100);
- }
- /********************************************************************
- * 名稱 :Moto_Stop()
- * 功能 : 電機1停止,電機2停止,整車表現為停止。
- ***********************************************************************/
- void Moto_Stop()
- {
-
- P2= 0x00;
- Delay_1ms(100);
- }
- /********************************************************************
- * 功能 : 舵機PWM中斷初始化
- ***********************************************************************/
- void Timer0Init()
- {
- /*0度=0.5ms, 45度=1ms, 90度=1.5ms, 135度=2ms, 180度=2.5ms
- /.5 ms初始值 F700, (12n/11059200=2.5/1000, n=2304, X=65536-2304=63232 > F700)*/
- TMOD |= 0x01; //使用模式1,16位定時器,使用"|"符號可以在使用多個定時器時不受影響
- TH0=-ms2_5Con>>8; //給定初值,17ms中斷
- TL0=-ms2_5Con;
- EA=1; //總中斷打開
- ET0=1; //定時器0中斷打開
- TR0=1; //定時器0開關打開
- }
- /********************************************************************
- * 功能 : 舵機PWM中斷, //舵機控制函數 周期為20ms 一個循環20MS = 8*2.5ms
- ***********************************************************************/
- void SteeringGear() interrupt 1
- {
- switch(pwm_flag)
- {
- case 1: servo0=1; TH0=-pwm[0]>>8; TL0=-pwm[0]; break;
- case 2: servo0=0; TH0=-(ms2_5Con-pwm[0])>>8; TL0=-(ms2_5Con-pwm[0]); break;
- case 3: servo1=1; TH0=-pwm[1]>>8; TL0=-pwm[1]; break;
- case 4: servo1=0; TH0=-(ms2_5Con-pwm[1])>>8; TL0=-(ms2_5Con-pwm[1]); break;
- case 5: servo2=1; TH0=-pwm[2]>>8; TL0=-pwm[2]; break;
- case 6: servo2=0; TH0=-(ms2_5Con-pwm[2])>>8; TL0=-(ms2_5Con-pwm[2]); break;
- case 7: servo3=1; TH0=-pwm[3]>>8; TL0=-pwm[3]; break;
- case 8: servo3=0; TH0=-(ms2_5Con-pwm[3])>>8; TL0=-(ms2_5Con-pwm[3]); break;
- case 9: servo4=1; TH0=-pwm[4]>>8; TL0=-pwm[4]; break;
- case 10: servo4=0; TH0=-(ms2_5Con-pwm[4])>>8; TL0=-(ms2_5Con-pwm[4]); break;
- case 11: servo5=1; TH0=-pwm[5]>>8; TL0=-pwm[5]; break;
- case 12: servo5=0; TH0=-(ms2_5Con-pwm[5])>>8; TL0=-(ms2_5Con-pwm[5]); break;
- case 13: servo6=1;TH0=-pwm[6]>>8; TL0=-pwm[6]; break;
- case 14: servo6=0;TH0=-(ms2_5Con-pwm[6])>>8; TL0=-(ms2_5Con-pwm[6]); break;
- case 15: servo7=1;TH0=-pwm[7]>>8; TL0=-pwm[7]; break;
- case 16: servo7=0;TH0=-(ms2_5Con-pwm[7])>>8; TL0=-(ms2_5Con-pwm[7]); break;
- default: TH0=0xff; TL0=0x80; pwm_flag=0;
- }
- pwm_flag++;
- }
-
- void SetSteeringGear(uchar i, uchar val)
- {
- uint a = (val+46)*10;
- if(a<ms0_5Con)
- a=ms0_5Con;
- if(a>ms2_5Con)
- a=ms2_5Con;
- pwm[ i]=a;
- CommandDatatable[2]=0xff; //清除緩存
- }
-
- /********************************************************************
- * 功能 : 串口中斷接收數據
- ***********************************************************************/
- /*********************************************************************************
- ** 函數功能 : 主函數
- *********************************************************************************/
- void main()
- {
- MainLight=0;
- Delay_1ms(200);
- Com_Init();//串口初始化
- Timer0Init();//舵機PWM中斷初始化
- while(1)
- {
- if(CommandDatatable[0]==0XFF && CommandDatatable[4]==0XFF)
- {
- switch (CommandDatatable[1]) //根據鍵值不同,執行不同的內容
- {
- case 0X00: //類型位0X00,表明是控制數據包,進入控制數據case
- switch(CommandDatatable[2]) //根據數據位的值來進行選擇執行不同的動作
- {
- case 0X00:Moto_Stop();break;
- case 0X01:Moto_Forward();break;
- case 0X02:Moto_Backward();break;
- case 0X03:Moto_TurnLeft();break;
- case 0X04:Moto_TurnRight();break;
- default : break;
- }
- break;
- case 0X01: //類型位0X01,表明是舵機數據包,進入舵機case
- switch(CommandDatatable[2])
- {
- case 0x01:SetSteeringGear(0,CommandDatatable[3]);break;
- case 0x02:SetSteeringGear(1,CommandDatatable[3]);break;
- case 0x03:SetSteeringGear(2,CommandDatatable[3]);break;
- case 0x04:SetSteeringGear(3,CommandDatatable[3]);break;
- case 0x05:SetSteeringGear(4,CommandDatatable[3]);break;
- case 0x06:SetSteeringGear(5,CommandDatatable[3]);break;
- case 0x07:SetSteeringGear(6,CommandDatatable[3]);break;
- case 0x08:SetSteeringGear(7,CommandDatatable[3]);break;
- default : break;
- }
- break;
- case 0X02: //類型位0X02,表明是大燈數據包,進入大燈case
- switch(CommandDatatable[2])
- {
- case 0X01:MainLight=1;break;
- case 0X02:MainLight=0;break;
- default : break;
- }
- break;
- default : break;
- }
- }
- }
- }
作者: lingshi1029 時間: 2015-1-22 11:12
厲害!!!!!
作者: meilidianzhi 時間: 2015-2-14 19:18
樓主能發個電路圖吧
minmin_6666@163.com
作者: 破力達 時間: 2015-2-16 11:21
這個我喜歡,頂一個
作者: 202305415 時間: 2015-3-1 22:23
看樣子很性 不錯
作者: kvlhn 時間: 2015-3-14 10:52
動力十足
作者: wangkuli 時間: 2015-4-19 13:29
牛 厲害
作者: yuxin 時間: 2015-4-21 10:35
牛逼!!!!!!!
作者: yuxin 時間: 2015-4-21 10:36
牛逼,希望我也能做出
作者: 心宇(語) 時間: 2015-4-22 22:28
學習一下,謝謝!
作者: 好男人就是我 時間: 2015-4-23 14:32
感謝分享~!!!
作者: yesonjob 時間: 2015-4-23 17:34
大神~
我的目標也是自己制作一個大型點的小車。
作者: deka 時間: 2015-6-14 09:31
厲害 高手
作者: rich3524 時間: 2015-7-13 10:13
厲害 高手
作者: yxfx 時間: 2015-7-16 06:15
這才是真正的高手,學習中
作者: 騰飛的龍 時間: 2015-8-3 19:47
這只是下位機程序,上位機的APP呢?求解謝謝。
作者: 人生過客 時間: 2015-8-5 15:39
攝像頭還是大了點
作者: 騰飛的龍 時間: 2015-8-6 14:12
這是我做的載人小車
-
IMG_20150326_180402.jpg
(664.49 KB, 下載次數: 232)
下載附件
2015-8-6 14:11 上傳


我做的載人小車
作者: 李文軍 時間: 2015-8-8 09:24
喜歡這些
作者: 騎著蝸牛游世界 時間: 2016-4-16 23:29
在這居然能碰到校友
作者: lxa0 時間: 2016-8-7 02:41
求更多載人小車的資料~~~~~~~~~~~~~~謝謝!
作者: sax_yang 時間: 2016-11-8 08:23
樓主厲害,追求完全DIY!和樓主探討一下,那就是用模型用的鋰電換下那個18650組成的電池組是否可行,體積可以減小不少,而且各種放電倍率可以根據需要來選擇,而且充電口也是標準的,可以很方便的使用充電器進行平衡充放電。
作者: gww19940326 時間: 2016-11-15 17:16
不錯不錯
作者: qjyjack612510 時間: 2017-3-21 23:07
非常NB。。。。學習了
作者: cathy221 時間: 2017-3-23 16:17
很好的創意頂起!
作者: samking 時間: 2017-5-18 02:26
mark一下~
作者: 我一歲 時間: 2017-6-12 18:38
能具體說一下攝像頭部分嗎 萬分感謝 QQ1275171943
作者: 906875672 時間: 2017-9-22 10:40
能不能請教一下啊,51單片機處理視頻數據速度跟的上嗎
| 歡迎光臨 (http://www.izizhuan.cn/bbs/) |
Powered by Discuz! X3.1 |
网友自拍一区|
青青草99啪国产免费|
欧美老女人在线|
色999日韩国产欧美一区二区|
一区二区三区精品在线|
亚洲三级视频在线观看|
亚洲欧洲日韩在线|
亚洲视频免费在线|
亚洲精品国产无套在线观|
亚洲免费看黄网站|
亚洲永久免费视频|
国产精品一区二区三区美女|
日韩一区二区三免费高清在线观看|
成人国产一区|
久久影院一区二区三区|
牛牛精品成人免费视频|
国产videos久久|
色综合久久网|
中文字幕人成人乱码|
国内精品嫩模av私拍在线观看|
99国产精品私拍|
久久久精品日韩|
九色综合狠狠综合久久|
成人精品小蝌蚪|
国产午夜三级一区二区三|
国产精品激情偷乱一区二区∴|
亚洲一区视频在线|
欧美色视频在线观看|
日韩免费在线观看|
在线播放国产一区中文字幕剧情欧美
|
日本欧美韩国一区三区|
久久99精品国产麻豆婷婷|
国v精品久久久网|
国产精品三级电影|
精品福利在线看|
91麻豆精品国产91久久久
|
91精品国产乱码久久久久久久|
亚洲一区 二区 三区|
每日更新成人在线视频|
国产精品996|
中文一区在线播放|
色综合久久久久久久久|
亚洲成人在线视频播放|
久热在线中文字幕色999舞|
日韩视频免费看|
国产精品黄色av|
国产精品加勒比|
亚洲黄色成人久久久|
黄色一级片黄色|
国产福利在线免费|
五月天精品在线|
免费中文字幕视频|
99在线精品视频免费观看软件
|
羞羞色国产精品网站|
波多野结衣一区|
亚洲国产一区二区三区高清|
老牛嫩草一区二区三区日本|
国产成人在线观看|
怡红院av一区二区三区|
欧洲亚洲国产日韩|
亚洲欧美日韩视频一区|
4438全国亚洲精品在线观看视频|
成人免费观看a|
久久亚洲综合网|
91久久夜色精品国产网站|
成人羞羞网站入口|
欧美日韩在线大尺度|
久久99热狠狠色一区二区|
av电影天堂一区二区在线观看|
中文字幕在线不卡一区|
欧美日韩一区二区三区|
日韩精品一区二区三区swag|
日韩在线视频网站|
日本亚洲欧洲色α|
区一区二区三区中文字幕|
久久久99精品视频|
大尺度在线观看|
日韩一区二区麻豆国产|
精品久久久久久久人人人人传媒|
久青草国产97香蕉在线视频|
欧美诱惑福利视频|
日韩av电影免费观看|
亚洲午夜精品久久久久久人妖|
a级片在线观看视频|
国产精品白嫩白嫩大学美女|
999久久久久|
国产精品久久精品牛牛影视|
色先锋av影音|
91se在线|
136国产福利精品导航网址应用|
亚洲看片一区|
国产日韩精品一区二区三区在线|
欧美在线一二三四区|
精品国产区一区二区三区在线观看|
国产精品一区二区三区在线播放|
久久免费一级片|
国产伦精品一区二区三区88av|
久久精品国产亚洲av高清色欲|
手机看片一区二区三区|
亚色视频在线播放|
欧美7777|
亚洲精品免费观看|
亚洲精品乱码久久久久久|
亚洲人成网站777色婷婷|
成人欧美一区二区三区在线观看
|
青青青国产在线视频|
欧美人妻精品一区二区三区
|
jizz国产|
欧美日韩国产网站|
99re国产精品|
亚洲va中文字幕|
欧美黄色www|
国产性生活免费视频|
尤物在线免费视频|
国产免费a级片|
日韩 国产 欧美|
成年女人a毛片免费视频|
精灵使的剑舞无删减版在线观看|
97精品国产一区二区三区|
久久奇米777|
亚洲国产精品电影在线观看|
精品欧美一区二区精品久久|
亚洲色偷偷色噜噜狠狠99网|
wwwav在线播放|
新版中文字幕在线资源|
亚洲欧美tv|
久久精品视频在线看|
亚洲人成77777在线观看网|
久久精品久久久久久国产 免费|
久久精品人成|
人妻体内射精一区二区|
性欧美大胆高清视频|
在线观看小视频|
黄色成人av网站|
精品日韩中文字幕|
国产精品黄视频|
亚洲免费黄色录像|
少妇又色又爽又黄的视频|
18视频免费网址在线观看|
综合一区二区三区|
精品成人乱色一区二区|
国产美女搞久久|
国内精品免费视频|
中文字幕2022永久在线|
丁香花视频在线观看|
丝袜美腿亚洲色图|
日韩一区二区三区三四区视频在线观看|
91原创国产|
非洲一级黄色片|
91www成人久久|
久久精品嫩草影院|
aaa欧美日韩|
91日韩精品一区|
亚洲精品中文字幕女同|
欧美大片免费播放|
四虎影院在线免费播放|
在线视频您懂的|
日韩精品一区二区三区免费观影|
亚洲一二三四在线|
国产成人亚洲综合91精品|
交换做爰国语对白|
欧美乱大交xxxxx另类|
影视一区二区三区|
av中文字幕在线不卡|
大量国产精品视频|
国产精品v日韩精品v在线观看|
欧美一级一区二区三区|
都市激情国产精品|
成人高清视频在线|
久久99热精品这里久久精品|
日韩在线一区视频|
麻豆国产高清在线播放|
国产精品亚洲欧美一级在线|
中文字幕 久热精品 视频在线|
2023亚洲男人天堂|
少妇精品一区二区|
777sesese|
99精品综合|
欧美日韩电影在线|
中国成人亚色综合网站|
在线观看免费黄色小视频|
日本视频在线免费观看|
奇米777欧美一区二区|
永久免费毛片在线播放不卡|
国产片侵犯亲女视频播放|
99热这里只有精品在线观看|
三妻四妾的电影电视剧在线观看|
国产成人精品1024|
久久久久久久999精品视频|
一本之道在线视频|
任你操在线观看|
欧美日韩中文一区二区|
欧美三级中文字幕在线观看|
最新精品视频|
午夜精品无码一区二区三区|
国产精品扒开腿做爽爽爽视频软件|
久久美女高清视频|
国产在线观看一区二区三区
|
中文字幕在线观看91|
色橹橹高清视频在线播放|
精品中文字幕一区二区三区av|
欧美成人vps|
亚洲国产精品久久一线不卡|
91老司机在线|
欧美三根一起进三p|
欧美女优在线|
天堂va蜜桃一区二区三区|
中文日韩在线观看|
亚洲欧美日韩一二三区|
网站免费满18成年在线观看|
亚洲大片精品免费|
欧美男男青年gay1069videost|
久久久久久久久网|
午夜国产在线观看|
julia中文字幕一区二区99在线|
欧美性猛交xxxx久久久|
黄频视频在线观看|
av女名字大全列表|
91黄色国产视频|
国产v综合v亚洲欧美久久|
国产精品久久久久久在线观看|
美女喷水网站|
欧美日本一区|
色黄久久久久久|
好吊色视频一区二区三区|
在线视频99|
理论片日本一区|
欧洲亚洲在线视频|
欧美日韩精品亚洲精品|
国产传媒在线播放|
亚洲国产精品久久久天堂|
亚洲精品一区二区网址|
国内自拍偷拍视频|
在线观看黄色片|
国产成人av电影免费在线观看|
国产精品69av|
久草视频这里只有精品|
91小视频网站|
青青草免费观看完整版高清|
牛牛国产精品|
中文字幕国内精品|
中文字幕在线观看的网站|
免费在线视频一级不卡|
91色|porny|
久久精品国产理论片免费|
韩国av电影在线观看|
日韩精品免费一区二区夜夜嗨|
精品国产乱码久久久久久久|
午夜一级免费视频|
亚洲一区二区三区精品中文字幕|
不卡的看片网站|
国模精品娜娜一二三区|
www.久久成人|
精品国产一区二区三区小蝌蚪|
亚洲欧美日韩国产精品|
肥熟一91porny丨九色丨|
午夜视频网站在线观看|
精品国产第一国产综合精品|
欧美一二三区在线|
91九色蝌蚪porny|
亚洲免费视频一区二区三区|
亚洲欧美综合在线精品|
青青草影院在线观看|
美美女免费毛片|
精品一区二区三区视频在线观看|
亚洲一区二区三区成人在线视频精品|
www.超碰在线.com|
日韩大片在线|
欧美激情图片区|
国产又大又黄又粗|
亚洲网一区二区三区|
亚洲精品国产综合久久|
中文字幕丰满乱子伦无码专区|
最新日本在线观看|
黑人巨大精品欧美一区二区免费|
日本888xxxx|
日色在线视频|
亚洲免费在线视频|
无码人妻h动漫|
一二三中文字幕在线|
国产精品欧美久久久久无广告|
水蜜桃在线免费观看|
av午夜电影|
97成人超碰视|
日本阿v视频在线观看|
黄色毛片视频|
国产精品网曝门|
播放灌醉水嫩大学生国内精品|
中国大陆高清aⅴ毛片|
国产在线播放一区三区四|
色成年激情久久综合|
伊人色在线视频|
91吃瓜网在线观看|
精品国产91久久久|
亚洲一级片av|
中日韩高清电影网|
欧美特级限制片免费在线观看|
不许穿内裤随时挨c调教h苏绵|
很黄的网站在线观看|
欧美在线播放高清精品|
免费a在线观看播放|
刘亦菲一区二区三区免费看|
精品国产髙清在线看国产毛片|
91麻豆精品成人一区二区|
欧州一区二区三区|
精品国产区一区二区三区在线观看|
日韩免费av网站|
天天久久综合|
国产美女精品视频|
久本草在线中文字幕亚洲欧美|
国产在线国偷精品产拍免费yy|
91精品一区二区三区蜜桃|
视频国产一区二区三区|
亚洲精品久久久蜜桃|
亚洲精品视频三区|
国产乱妇乱子在线播视频播放网站|
欧美日韩一区小说|
999福利视频|
波多野结衣在线一区二区|
欧美疯狂xxxx大交乱88av|
国产成人精品无码高潮|
久久亚洲二区|
亚洲欧洲一区二区福利|
瑜伽美女视频|
欧美日韩免费区域视频在线观看|
你懂的在线观看网站|
精品久久99|
欧美国产日本在线|
午夜成人免费影院|
高清成人免费视频|
精品www久久久久奶水|
久久久123|
污片在线免费观看|
欧美99在线视频观看|
成人精品一区二区三区电影免费
|
亚洲动漫第一页|
大黑人交xxx极品hd|
美女精品久久|
日本一欧美一欧美一亚洲视频|
欧美午夜性囗交xxxx|
白白色亚洲国产精品|
不卡av免费在线|
在线看的毛片|
欧美成人免费观看|
小说区图片区综合久久88|
26uuu久久天堂性欧美|
制服丝袜中文字幕第一页|
成人直播视频|
欧美激情一区二区三级高清视频|
最新版天堂中文在线官网|
av不卡一区二区三区|
亚洲精品欧美综合四区|
182在线视频|
成人另类视频|
国产欧美日韩视频|
天天插天天干|
日韩欧美第一页|
日韩高清精品免费观看|
亚洲午夜黄色|
中文字幕精品在线播放|
性直播体位视频在线观看|
亚洲人成在线电影|
污视频在线免费观看|
91视频一区二区三区|
国产高清成人久久|
日韩美女毛片|
国产女主播一区二区|
日韩av视屏|
亚洲精品国产综合久久|
国产刺激高潮av|
99精品视频在线观看免费|
国产一级二级av|
亚洲动漫精品|
免费观看成人在线|
麻豆视频在线免费观看|
精品国内亚洲在观看18黄|
热re99久久国产精品|
亚洲女同ⅹxx女同tv|
黄色片在线观看网站|
国产日本精品|
精品国产免费av|
成人乱码手机视频|
91探花福利精品国产自产在线|
最新中文字幕在线|
日韩av综合网站|
思思99精品视频在线观看|
亚洲日本一区二区|
久久精品国产亚洲av麻豆色欲|
日日骚欧美日韩|
玖玖爱视频在线|
亚州国产精品|
五月天色一区|
性欧美videohd高精|
国产日韩中文字幕|
免费a在线观看|
美乳少妇欧美精品|
2020色愉拍亚洲偷自拍|
精品嫩草影院久久|
可以直接看的黄色网址|
亚洲在线观看|
